 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-centered Feedback Design in Person-following Robots for Older Adults
Mar 24, 2021
Feedback design is an important aspect of person-following robots for older adults. This paper presents a user-centred design approach to ensure the design is focused on the needs and preferences of the users. A sequence of user studies with a total of 35 older adults (aged 62 years and older) was conducted to explore their preferences regarding feedback parameters for a socially assistive person-following robot. The preferred level of robot transparency and the desired content for the feedback was first explored. This was followed by an assessment of the preferred mode and timing of feedback. The chosen feedback parameters were then implemented and evaluated in a final experiment to evaluate the effectiveness of the design. Results revealed that older adults preferred to receive only basic status information. They preferred voice feedback overtone, and at a continuous rate to keep them constantly aware of the state and actions of the robot. The outcome of the study is a further step towards feedback design guidelines that could improve interaction quality for person-following robots for older adults.
Improving the interaction of Older Adults with Socially Assistive Robots for Table setting
Mar 24, 2021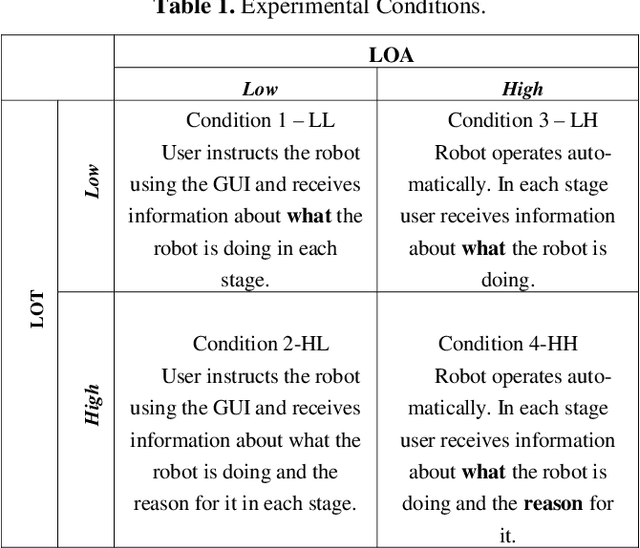
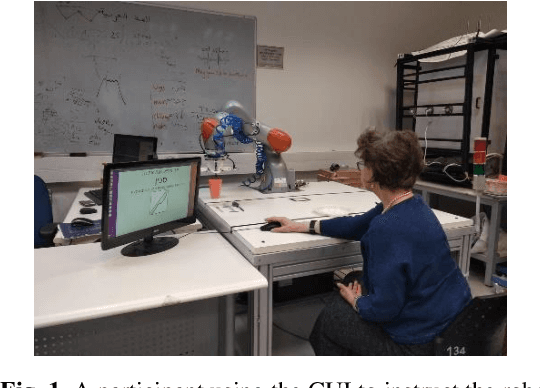
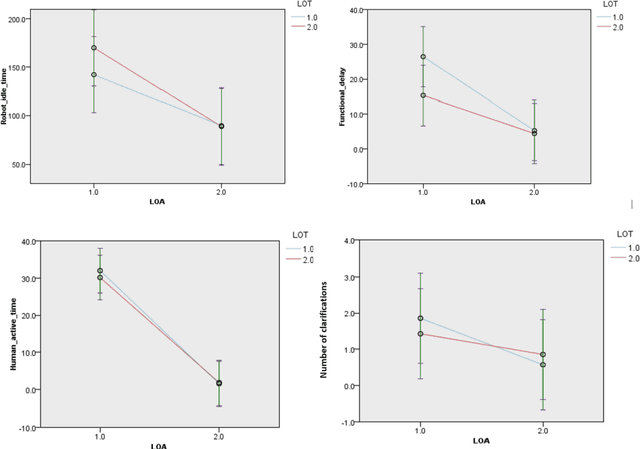
This study provides user-studies aimed at exploring factors influencing the interaction between older adults and a robotic table setting assistant. The in-fluence of the level of automation (LOA) and level of transparency (LOT) on the quality of the interaction was considered. Results revealed that the interaction effect of LOA and LOT significantly influenced the interaction. A lower LOA which required the user to control some of the actions of the robot influenced the older adults to participate more in the interaction when the LOT was low com-pared to situations with higher LOT (more information) and higher LOA (more robot autonomy). Even though the higher LOA influenced more fluency in the interaction, the lower LOA encouraged a more collaborative form of interaction which is a priority in the design of robotic aids for older adult users. The results provide some insights into shared control designs which accommodates the preferences of the older adult users as they interact with robotic aids such as the table setting robot used in this study.
Exploratory evaluation of politeness in human-robot interaction
Mar 15, 2021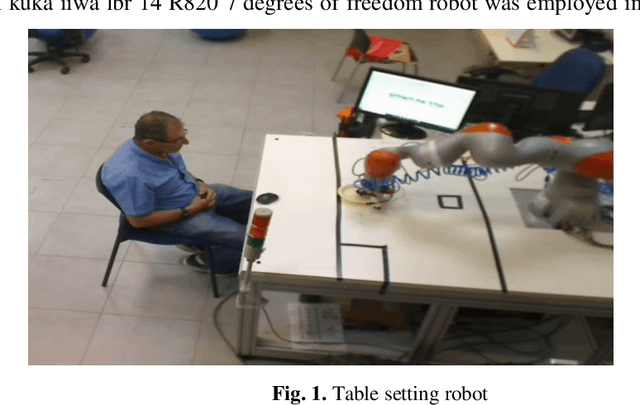

Aiming to explore the impact of politeness on Human robot interaction, this study tested varying levels of politeness in a human robot collaborative table setting task. Polite behaviour was designed based on the politeness rules of Lakoff. A graphical user interface was developed for the interaction with the robot offering three levels of politeness, and an experiment was conducted with 20 older adults and 30 engineering students. Results indicated that the quality of interaction was influenced by politeness as participants significantly preferred the polite mode of the robot. However, the older adults were less able to distinguish between the three politeness levels. Future studies should thus include pre experiment training to increase the familiarity of the older adults with robotic technology. These studies should also include other permutations of the politeness rules of Lakoff.
Feedback modalities for a table setting robot assistant for elder care
Mar 15, 2021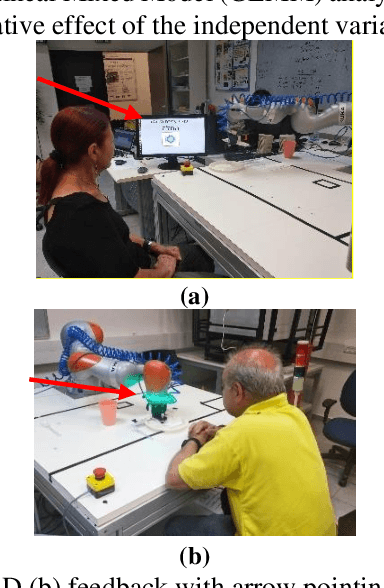
The interaction of Older adults with robots requires effective feedback to keep them aware of the state of the interaction for optimum interaction quality. This study examines the effect of different feedback modalities in a table setting robot assistant for elder care. Two different feedback modalities (visual and auditory) and their combination were evaluated for three complexity levels. The visual feedback included the use of LEDs and a GUI screen. The auditory feedback included alerts (beeps) and verbal commands. The results revealed that the quality of interaction was influenced mainly by the feedback modality, and complexity had less influence. The verbal feedback was significantly preferable and increased the involvement of the participants during the experiment. The combination of LED lights and verbal commands increased participants' understanding contributing to the quality of interaction.