 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs it personal? The impact of personally relevant robotic failures on humans' trust, likeability, and willingness to use the robot
Jan 14, 2022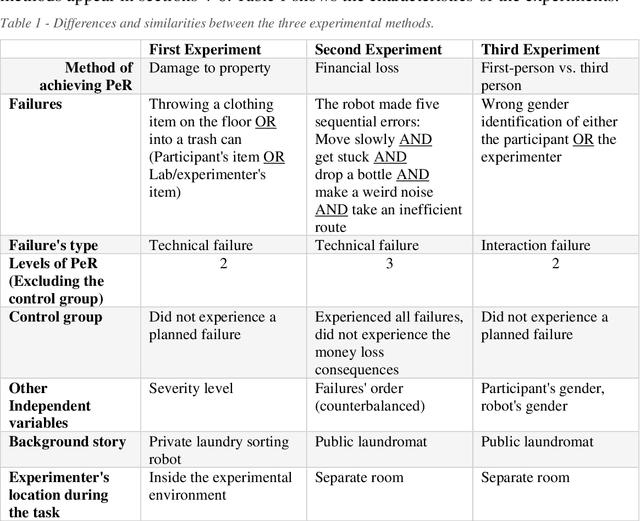
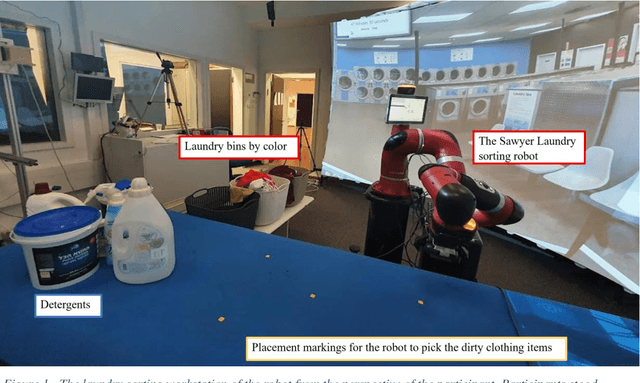
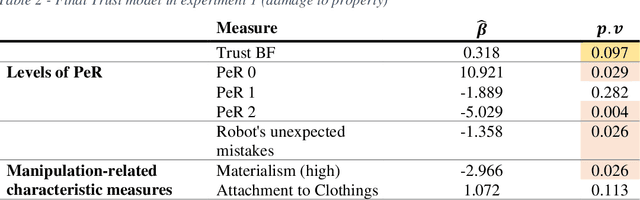
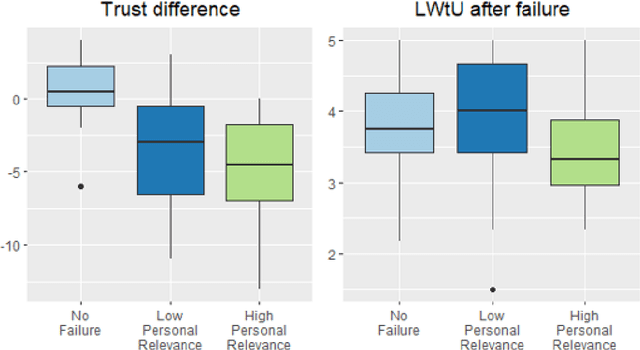
In three laboratory experiments, we examine the impact of personally relevant failures (PeRFs) on perceptions of a collaborative robot. PeR is determined by how much a specific issue applies to a particular person, i.e., it affects one's own goals and values. We hypothesized that PeRFs would reduce trust in the robot and the robot's Likeability and Willingness to Use (LWtU) more than failures that are not personal to participants. To achieve PeR in human-robot interaction, we utilized three different manipulation mechanisms: A) damage to property, B) financial loss, and C) first-person versus third-person failure scenarios. In total, 132 participants engaged with a robot in person during a collaborative task of laundry sorting. All three experiments took place in the same experimental environment, carefully designed to simulate a realistic laundry sorting scenario. Results indicate that the impact of PeRFs on perceptions of the robot varied across the studies. In experiments A and B, the encounters with PeRFs reduced trust significantly relative to a no failure session. But not entirely for LWtU. In experiment C, the PeR manipulation had no impact. The work highlights challenges and adjustments needed for studying robotic failures in laboratory settings. We show that PeR manipulations affect how users perceive a failing robot. The results bring about new questions regarding failure types and their perceived severity on users' perception of the robot. Putting PeR aside, we observed differences in the way users perceive interaction failures compared (experiment C) to how they perceive technical ones (A and B).
Using Online Customer Reviews to Classify, Predict, and Learn about Domestic Robot Failures
Jan 10, 2022
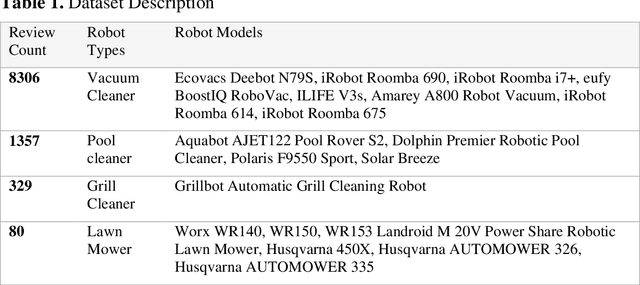
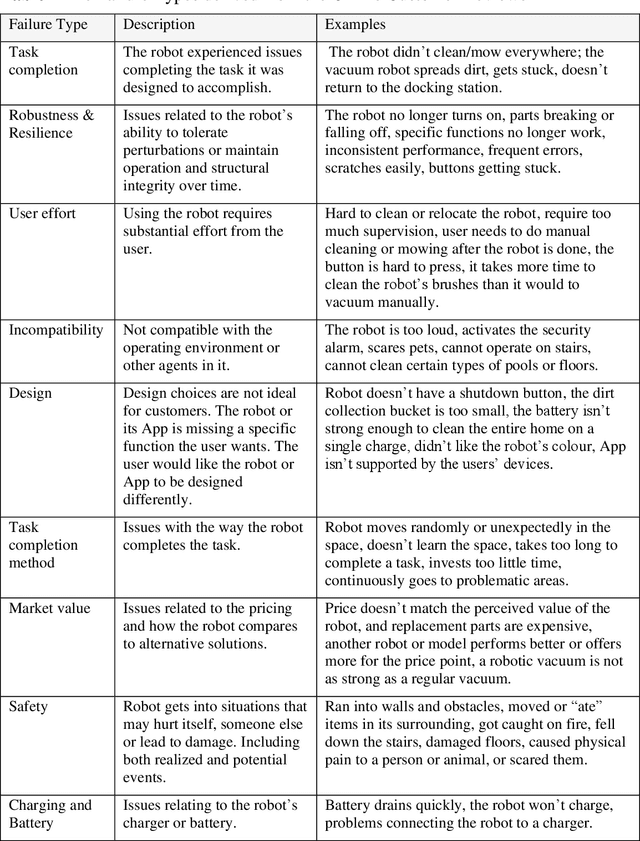
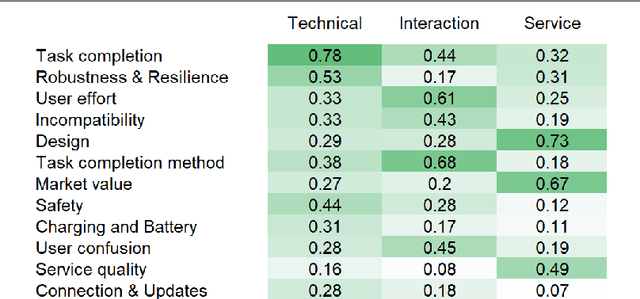
There is a knowledge gap regarding which types of failures robots undergo in domestic settings and how these failures influence customer experience. We classified 10,072 customer reviews of small utilitarian domestic robots on Amazon by the robotic failures described in them, grouping failures into twelve types and three categories (Technical, Interaction, and Service). We identified sources and types of failures previously overlooked in the literature, combining them into an updated failure taxonomy. We analyzed their frequencies and relations to customer star ratings. Results indicate that for utilitarian domestic robots, Technical failures were more detrimental to customer experience than Interaction or Service failures. Issues with Task Completion and Robustness & Resilience were commonly reported and had the most significant negative impact. Future failure-prevention and response strategies should address the technical ability of the robot to meet functional goals, operate and maintain structural integrity over time. Usability and interaction design were less detrimental to customer experience, indicating that customers may be more forgiving of failures that impact these aspects for the robots and practical uses examined. Further, we developed a Natural Language Processing model capable of predicting whether a customer review contains content that describes a failure and the type of failure it describes. With this knowledge, designers and researchers of robotic systems can prioritize design and development efforts towards essential issues.