 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Robotic Experimenters help improve HRI Experiments? An Experimental Study
Nov 24, 2023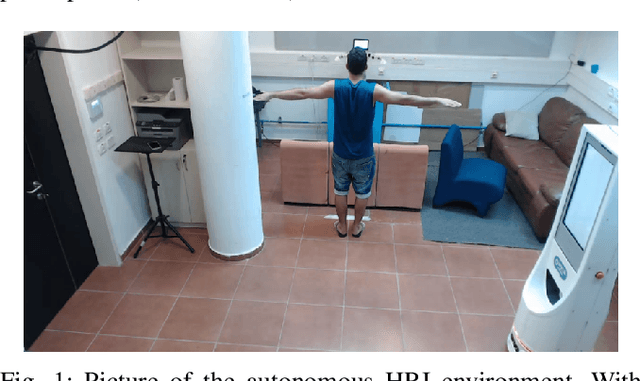
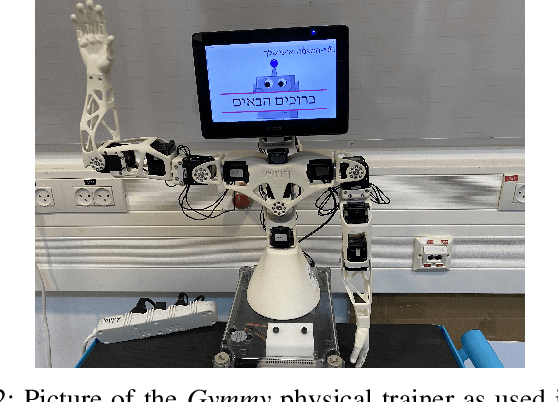
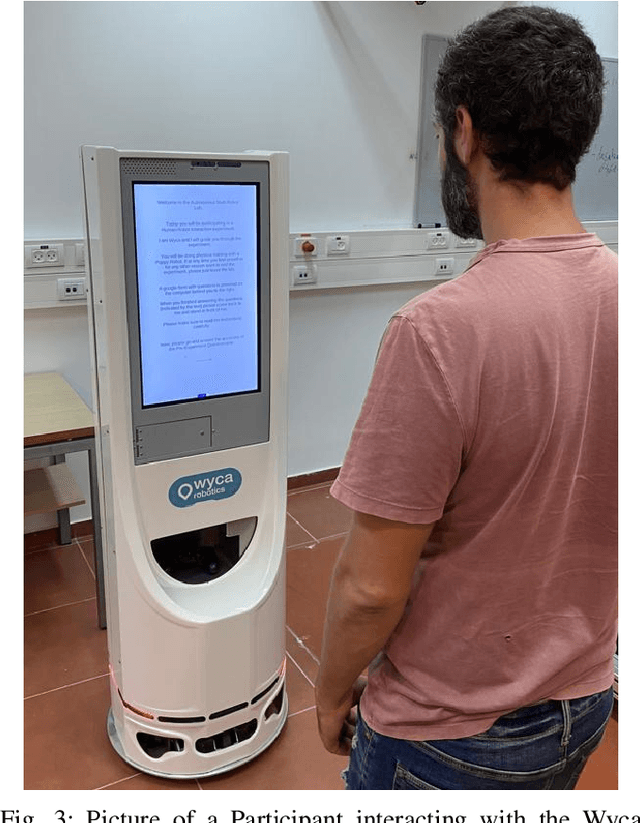
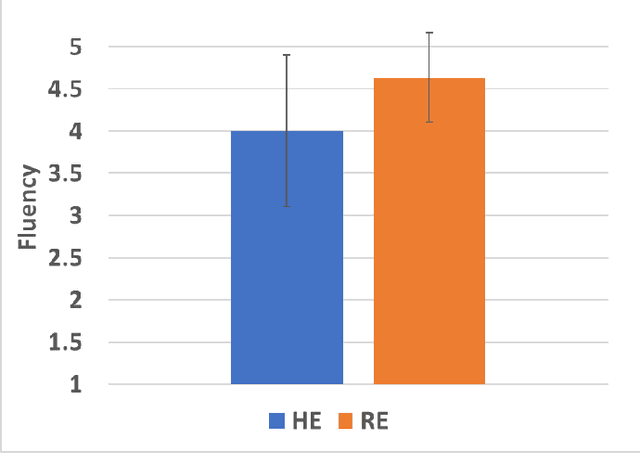
To evaluate the design and skills of a robot or an algorithm for robotics, human-robot interaction user studies need to be performed. Classically, these studies are conducted by human experimenters, requiring considerable effort, and introducing variability and potential human error. In this paper, we investigate the use of robots in support of HRI experiments. Robots can perform repeated tasks accurately, thereby reducing human effort and improving validity through reduction of error and variability between participants. To assess the potential for robot led HRI experiments, we ran an HRI experiment with two participant groups, one led by a human experimenter and another led mostly by a robot experimenter.We show that the replacement of several repetitive experiment tasks through robots is not only possible but beneficial: Trials performed by the robot experimenter had fewer errors and were more fluent. There was no statistically significant difference in participants' perception w.r.t. cognitive load, comfortability, enjoyment, safety, trust and understandability between both groups. To the best of our knowledge, this is the first comparison between robot-led and human-led HRI experiments. It suggests that using robot experimenters can be beneficial and should be considered.
Optometrist's Algorithm for Personalizing Robot-Human Handovers
Aug 29, 2023

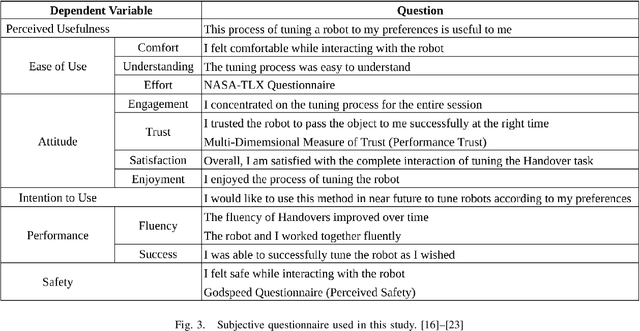

With an increasing interest in human-robot collaboration, there is a need to develop robot behavior while keeping the human user's preferences in mind. Highly skilled human users doing delicate tasks require their robot partners to behave according to their work habits and task constraints. To achieve this, we present the use of the Optometrist's Algorithm (OA) to interactively and intuitively personalize robot-human handovers. Using this algorithm, we tune controller parameters for speed, location, and effort. We study the differences in the fluency of the handovers before and after tuning and the subjective perception of this process in a study of $N=30$ non-expert users of mixed background -- evaluating the OA. The users evaluate the interaction on trust, safety, and workload scales, amongst other measures. They assess our tuning process to be engaging and easy to use. Personalization leads to an increase in the fluency of the interaction. Our participants utilize the wide range of parameters ending up with their unique personalized handover.
Towards Plug'n Play Task-Level Autonomy for Robotics Using POMDPs and Generative Models
Jul 20, 2022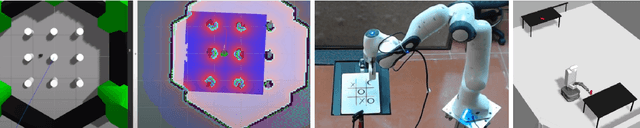
To enable robots to achieve high level objectives, engineers typically write scripts that apply existing specialized skills, such as navigation, object detection and manipulation to achieve these goals. Writing good scripts is challenging since they must intelligently balance the inherent stochasticity of a physical robot's actions and sensors, and the limited information it has. In principle, AI planning can be used to address this challenge and generate good behavior policies automatically. But this requires passing three hurdles. First, the AI must understand each skill's impact on the world. Second, we must bridge the gap between the more abstract level at which we understand what a skill does and the low-level state variables used within its code. Third, much integration effort is required to tie together all components. We describe an approach for integrating robot skills into a working autonomous robot controller that schedules its skills to achieve a specified task and carries four key advantages. 1) Our Generative Skill Documentation Language (GSDL) makes code documentation simpler, compact, and more expressive using ideas from probabilistic programming languages. 2) An expressive abstraction mapping (AM) bridges the gap between low-level robot code and the abstract AI planning model. 3) Any properly documented skill can be used by the controller without any additional programming effort, providing a Plug'n Play experience. 4) A POMDP solver schedules skill execution while properly balancing partial observability, stochastic behavior, and noisy sensing.
* In Proceedings AREA 2022, arXiv:2207.09058