 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Prior-Guided View Planning for Periodic 3D Plant Reconstruction
Oct 08, 2025Periodic 3D reconstruction is essential for crop monitoring, but costly when each cycle restarts from scratch, wasting resources and ignoring information from previous captures. We propose temporal-prior-guided view planning for periodic plant reconstruction, in which a previously reconstructed model of the same plant is non-rigidly aligned to a new partial observation to form an approximation of the current geometry. To accommodate plant growth, we inflate this approximation and solve a set covering optimization problem to compute a minimal set of views. We integrated this method into a complete pipeline that acquires one additional next-best view before registration for robustness and then plans a globally shortest path to connect the planned set of views and outputs the best view sequence. Experiments on maize and tomato under hemisphere and sphere view spaces show that our system maintains or improves surface coverage while requiring fewer views and comparable movement cost compared to state-of-the-art baselines.
Privacy Risks of Robot Vision: A User Study on Image Modalities and Resolution
May 12, 2025User privacy is a crucial concern in robotic applications, especially when mobile service robots are deployed in personal or sensitive environments. However, many robotic downstream tasks require the use of cameras, which may raise privacy risks. To better understand user perceptions of privacy in relation to visual data, we conducted a user study investigating how different image modalities and image resolutions affect users' privacy concerns. The results show that depth images are broadly viewed as privacy-safe, and a similarly high proportion of respondents feel the same about semantic segmentation images. Additionally, the majority of participants consider 32*32 resolution RGB images to be almost sufficiently privacy-preserving, while most believe that 16*16 resolution can fully guarantee privacy protection.
DM-OSVP++: One-Shot View Planning Using 3D Diffusion Models for Active RGB-Based Object Reconstruction
Apr 16, 2025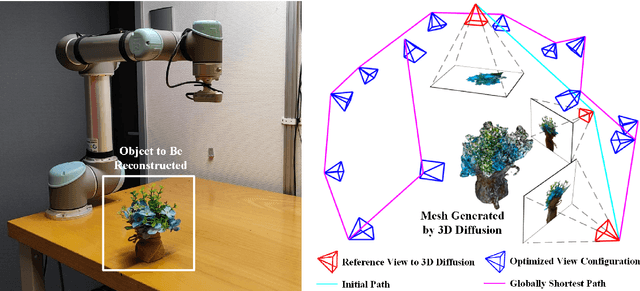
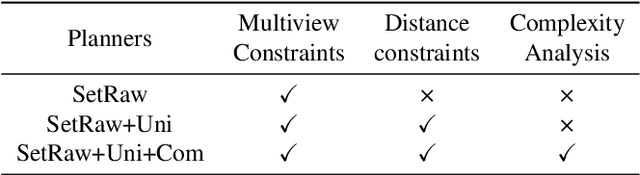
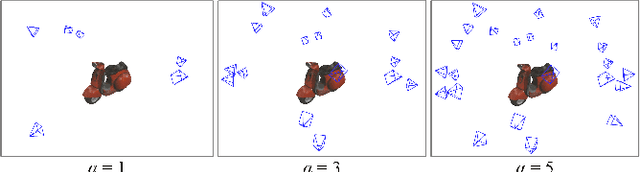
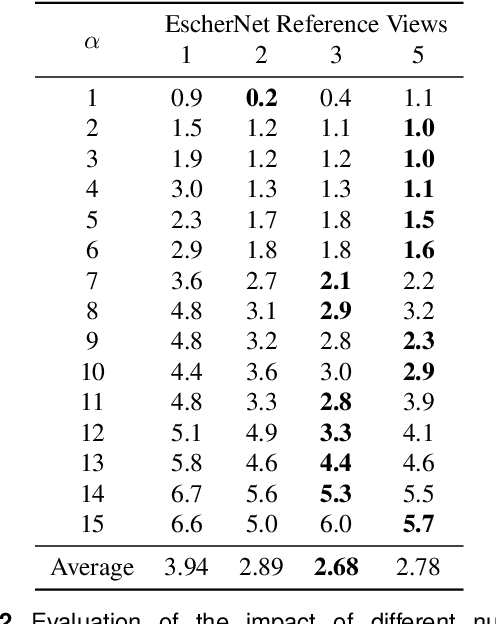
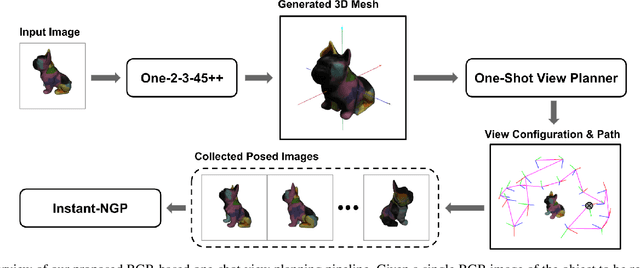
Active object reconstruction is crucial for many robotic applications. A key aspect in these scenarios is generating object-specific view configurations to obtain informative measurements for reconstruction. One-shot view planning enables efficient data collection by predicting all views at once, eliminating the need for time-consuming online replanning. Our primary insight is to leverage the generative power of 3D diffusion models as valuable prior information. By conditioning on initial multi-view images, we exploit the priors from the 3D diffusion model to generate an approximate object model, serving as the foundation for our view planning. Our novel approach integrates the geometric and textural distributions of the object model into the view planning process, generating views that focus on the complex parts of the object to be reconstructed. We validate the proposed active object reconstruction system through both simulation and real-world experiments, demonstrating the effectiveness of using 3D diffusion priors for one-shot view planning.
Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot View Planning
Mar 25, 2024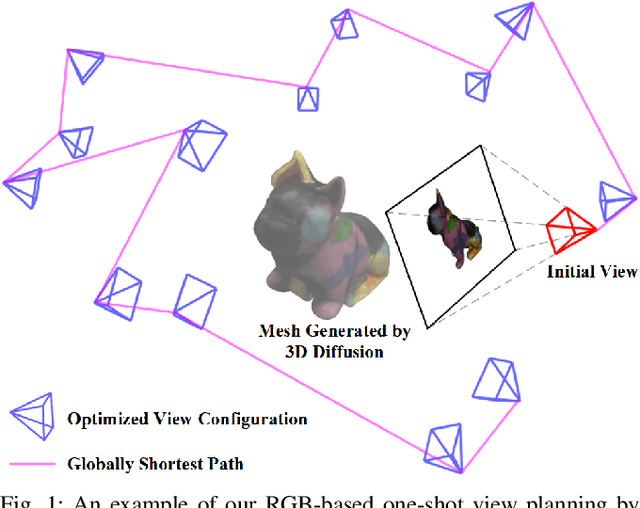
Object reconstruction is relevant for many autonomous robotic tasks that require interaction with the environment. A key challenge in such scenarios is planning view configurations to collect informative measurements for reconstructing an initially unknown object. One-shot view planning enables efficient data collection by predicting view configurations and planning the globally shortest path connecting all views at once. However, geometric priors about the object are required to conduct one-shot view planning. In this work, we propose a novel one-shot view planning approach that utilizes the powerful 3D generation capabilities of diffusion models as priors. By incorporating such geometric priors into our pipeline, we achieve effective one-shot view planning starting with only a single RGB image of the object to be reconstructed. Our planning experiments in simulation and real-world setups indicate that our approach balances well between object reconstruction quality and movement cost.