 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDM-OSVP++: One-Shot View Planning Using 3D Diffusion Models for Active RGB-Based Object Reconstruction
Paper and Code
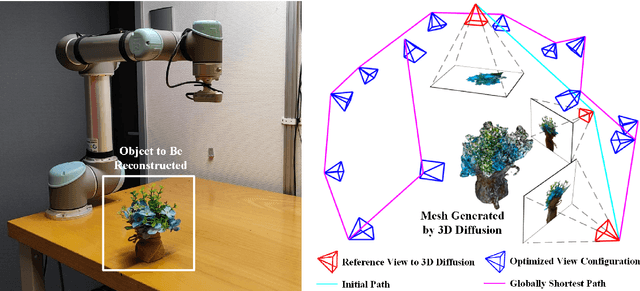
Active object reconstruction is crucial for many robotic applications. A key aspect in these scenarios is generating object-specific view configurations to obtain informative measurements for reconstruction. One-shot view planning enables efficient data collection by predicting all views at once, eliminating the need for time-consuming online replanning. Our primary insight is to leverage the generative power of 3D diffusion models as valuable prior information. By conditioning on initial multi-view images, we exploit the priors from the 3D diffusion model to generate an approximate object model, serving as the foundation for our view planning. Our novel approach integrates the geometric and textural distributions of the object model into the view planning process, generating views that focus on the complex parts of the object to be reconstructed. We validate the proposed active object reconstruction system through both simulation and real-world experiments, demonstrating the effectiveness of using 3D diffusion priors for one-shot view planning.