 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudo-Simulation for Autonomous Driving
Jun 04, 2025Existing evaluation paradigms for Autonomous Vehicles (AVs) face critical limitations. Real-world evaluation is often challenging due to safety concerns and a lack of reproducibility, whereas closed-loop simulation can face insufficient realism or high computational costs. Open-loop evaluation, while being efficient and data-driven, relies on metrics that generally overlook compounding errors. In this paper, we propose pseudo-simulation, a novel paradigm that addresses these limitations. Pseudo-simulation operates on real datasets, similar to open-loop evaluation, but augments them with synthetic observations generated prior to evaluation using 3D Gaussian Splatting. Our key idea is to approximate potential future states the AV might encounter by generating a diverse set of observations that vary in position, heading, and speed. Our method then assigns a higher importance to synthetic observations that best match the AV's likely behavior using a novel proximity-based weighting scheme. This enables evaluating error recovery and the mitigation of causal confusion, as in closed-loop benchmarks, without requiring sequential interactive simulation. We show that pseudo-simulation is better correlated with closed-loop simulations (R^2=0.8) than the best existing open-loop approach (R^2=0.7). We also establish a public leaderboard for the community to benchmark new methodologies with pseudo-simulation. Our code is available at https://github.com/autonomousvision/navsim.
Data Scaling Laws for End-to-End Autonomous Driving
Apr 06, 2025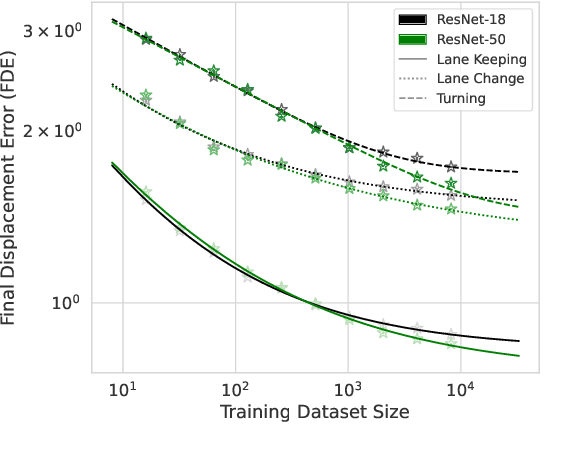
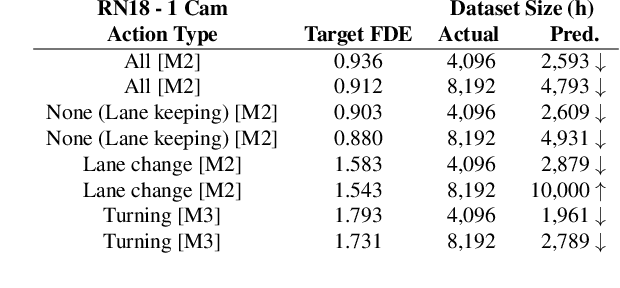
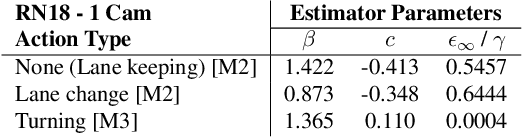
Autonomous vehicle (AV) stacks have traditionally relied on decomposed approaches, with separate modules handling perception, prediction, and planning. However, this design introduces information loss during inter-module communication, increases computational overhead, and can lead to compounding errors. To address these challenges, recent works have proposed architectures that integrate all components into an end-to-end differentiable model, enabling holistic system optimization. This shift emphasizes data engineering over software integration, offering the potential to enhance system performance by simply scaling up training resources. In this work, we evaluate the performance of a simple end-to-end driving architecture on internal driving datasets ranging in size from 16 to 8192 hours with both open-loop metrics and closed-loop simulations. Specifically, we investigate how much additional training data is needed to achieve a target performance gain, e.g., a 5% improvement in motion prediction accuracy. By understanding the relationship between model performance and training dataset size, we aim to provide insights for data-driven decision-making in autonomous driving development.
Accelerating Online Mapping and Behavior Prediction via Direct BEV Feature Attention
Jul 09, 2024



Understanding road geometry is a critical component of the autonomous vehicle (AV) stack. While high-definition (HD) maps can readily provide such information, they suffer from high labeling and maintenance costs. Accordingly, many recent works have proposed methods for estimating HD maps online from sensor data. The vast majority of recent approaches encode multi-camera observations into an intermediate representation, e.g., a bird's eye view (BEV) grid, and produce vector map elements via a decoder. While this architecture is performant, it decimates much of the information encoded in the intermediate representation, preventing downstream tasks (e.g., behavior prediction) from leveraging them. In this work, we propose exposing the rich internal features of online map estimation methods and show how they enable more tightly integrating online mapping with trajectory forecasting. In doing so, we find that directly accessing internal BEV features yields up to 73% faster inference speeds and up to 29% more accurate predictions on the real-world nuScenes dataset.
Producing and Leveraging Online Map Uncertainty in Trajectory Prediction
Mar 25, 2024High-definition (HD) maps have played an integral role in the development of modern autonomous vehicle (AV) stacks, albeit with high associated labeling and maintenance costs. As a result, many recent works have proposed methods for estimating HD maps online from sensor data, enabling AVs to operate outside of previously-mapped regions. However, current online map estimation approaches are developed in isolation of their downstream tasks, complicating their integration in AV stacks. In particular, they do not produce uncertainty or confidence estimates. In this work, we extend multiple state-of-the-art online map estimation methods to additionally estimate uncertainty and show how this enables more tightly integrating online mapping with trajectory forecasting. In doing so, we find that incorporating uncertainty yields up to 50% faster training convergence and up to 15% better prediction performance on the real-world nuScenes driving dataset.