 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed fusion filter over lossy wireless sensor networks with the presence of non-Gaussian noise
Jul 07, 2023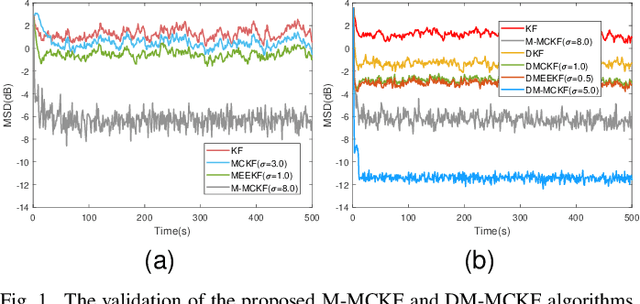
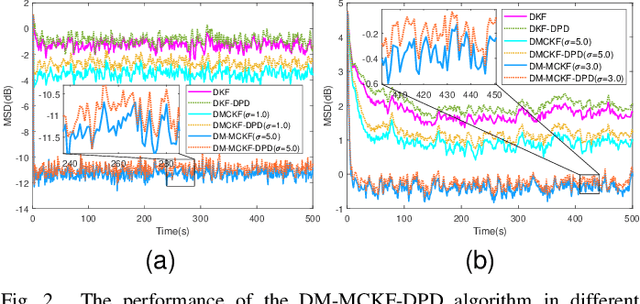
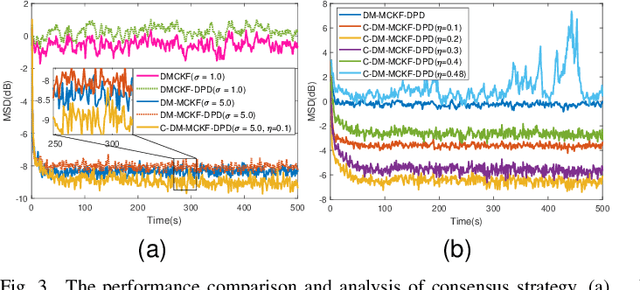
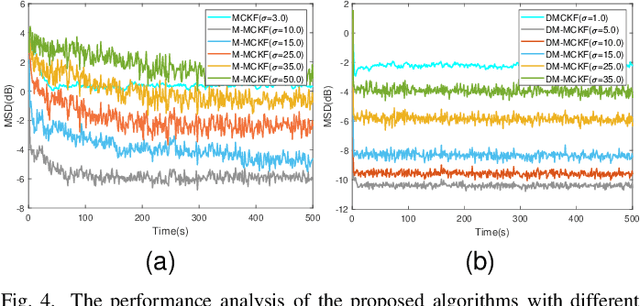
The information transmission between nodes in a wireless sensor networks (WSNs) often causes packet loss due to denial-of-service (DoS) attack, energy limitations, and environmental factors, and the information that is successfully transmitted can also be contaminated by non-Gaussian noise. The presence of these two factors poses a challenge for distributed state estimation (DSE) over WSNs. In this paper, a generalized packet drop model is proposed to describe the packet loss phenomenon caused by DoS attacks and other factors. Moreover, a modified maximum correntropy Kalman filter is given, and it is extended to distributed form (DM-MCKF). In addition, a distributed modified maximum correntropy Kalman filter incorporating the generalized data packet drop (DM-MCKF-DPD) algorithm is provided to implement DSE with the presence of both non-Gaussian noise pollution and packet drop. A sufficient condition to ensure the convergence of the fixed-point iterative process of the DM-MCKF-DPD algorithm is presented and the computational complexity of the DM-MCKF-DPD algorithm is analyzed. Finally, the effectiveness and feasibility of the proposed algorithms are verified by simulations.
A Model Fusion Distributed Kalman Filter For Non-Gaussian Observation Noise
Jun 20, 2023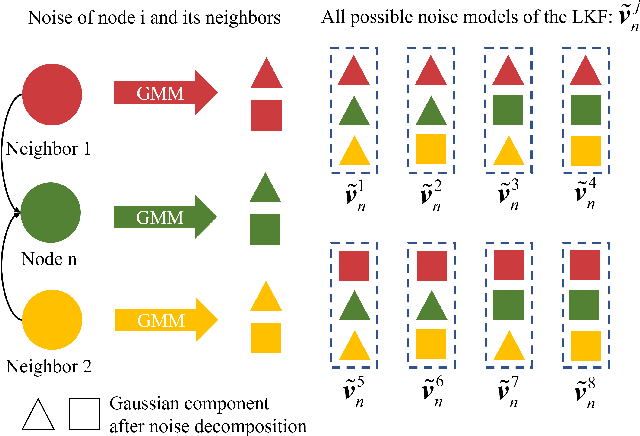
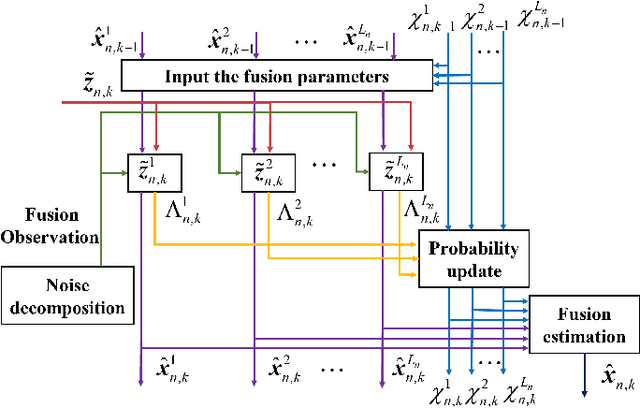
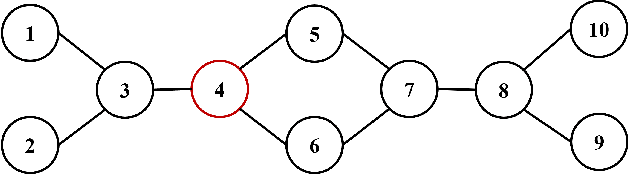
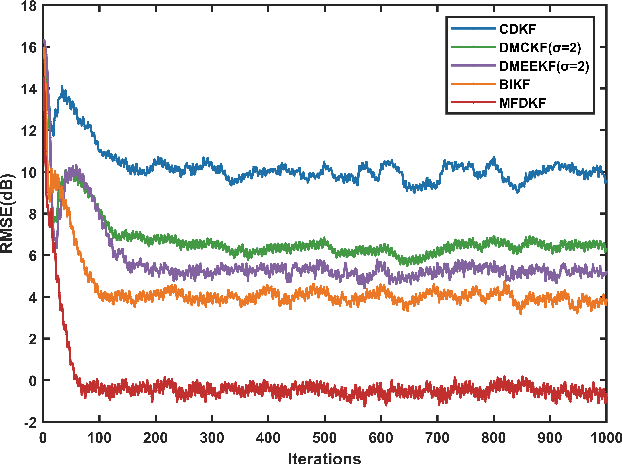
The distributed Kalman filter (DKF) has attracted extensive research as an information fusion method for wireless sensor systems(WSNs). And the DKF in non-Gaussian environments is still a pressing problem. In this paper, we approximate the non-Gaussian noise as a Gaussian mixture model and estimate the parameters through the expectation-maximization algorithm. A DKF, called model fusion DKF (MFDKF) is proposed against the non-Gaussain noise. Specifically, the proposed MFDKF is obtained by fusing the sub-models that are built based on the noise approximation with the help of interacting multiple model (IMM). Considering that some WSNs demand high consensus or have restricted communication, consensus MFDKF (C-MFDKF) and simplified MFDKF (S-MFDKF) are proposed based on consensus theory, respectively. The convergence of MFDKF and its derivative algorithms are analyzed. A series of simulations indicate the effectiveness of the MFDKF and its derivative algorithms.
State Estimation of Wireless Sensor Networks in the Presence of Data Packet Drops and Non-Gaussian Noise
Jan 14, 2023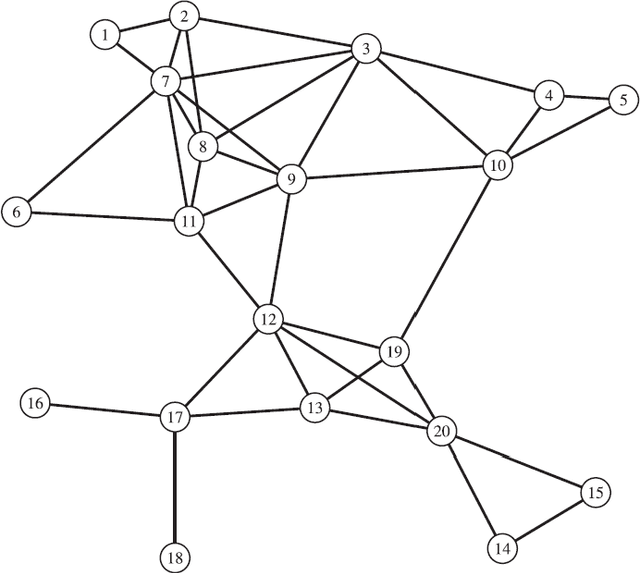
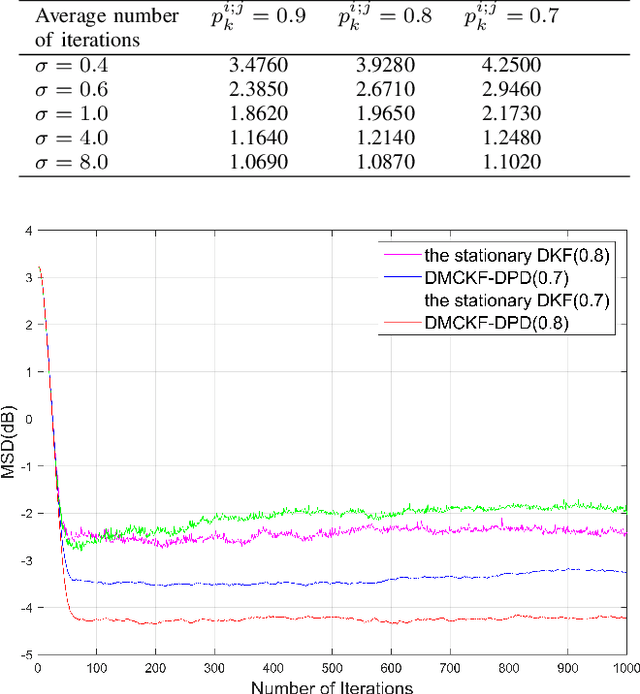
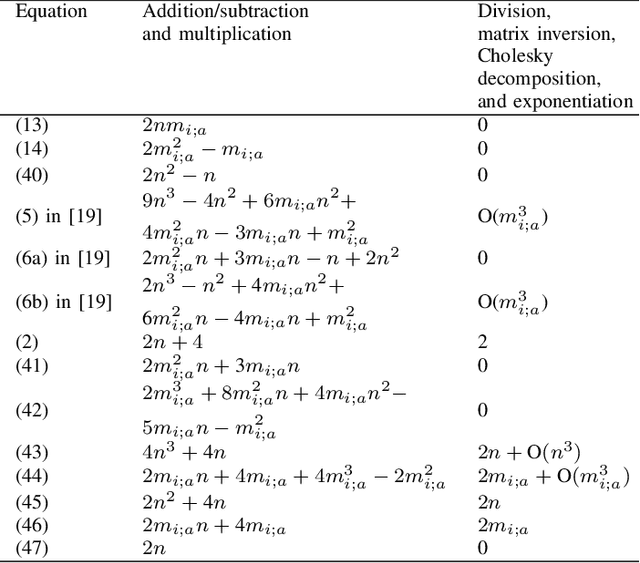

Distributed Kalman filter approaches based on the maximum correntropy criterion have recently demonstrated superior state estimation performance to that of conventional distributed Kalman filters for wireless sensor networks in the presence of non-Gaussian impulsive noise. However, these algorithms currently fail to take account of data packet drops. The present work addresses this issue by proposing a distributed maximum correntropy Kalman filter that accounts for data packet drops (i.e., the DMCKF-DPD algorithm). The effectiveness and feasibility of the algorithm are verified by simulations conducted in a wireless sensor network with intermittent observations due to data packet drops under a non-Gaussian noise environment. Moreover, the computational complexity of the DMCKF-DPD algorithm is demonstrated to be moderate compared with that of a conventional distributed Kalman filter, and we provide a sufficient condition to ensure the convergence of the proposed algorithm.