 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Expert Selection for Multi-Scenario and Multi-Task Search
Jun 06, 2022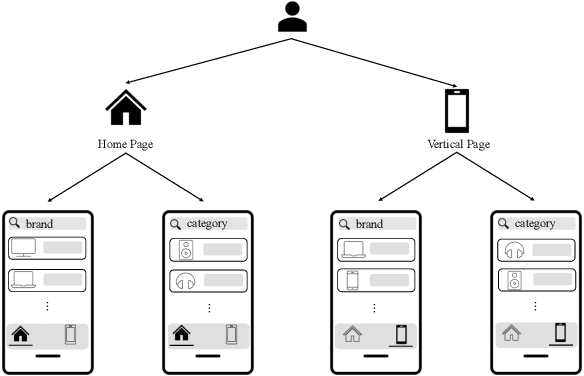
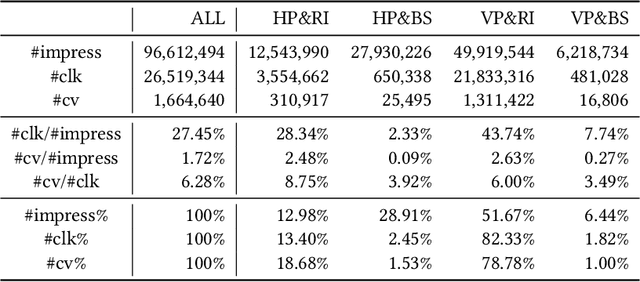
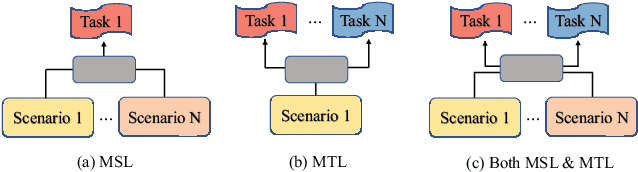
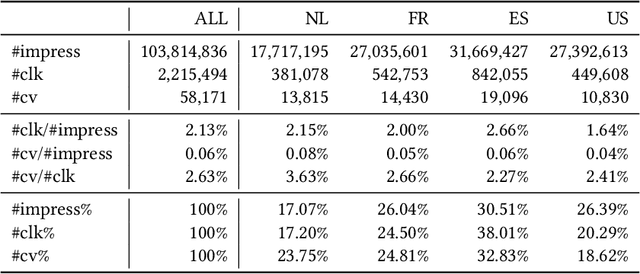
Multi-scenario learning (MSL) enables a service provider to cater for users' fine-grained demands by separating services for different user sectors, e.g., by user's geographical region. Under each scenario there is a need to optimize multiple task-specific targets e.g., click through rate and conversion rate, known as multi-task learning (MTL). Recent solutions for MSL and MTL are mostly based on the multi-gate mixture-of-experts (MMoE) architecture. MMoE structure is typically static and its design requires domain-specific knowledge, making it less effective in handling both MSL and MTL. In this paper, we propose a novel Automatic Expert Selection framework for Multi-scenario and Multi-task search, named AESM^{2}. AESM^{2} integrates both MSL and MTL into a unified framework with an automatic structure learning. Specifically, AESM^{2} stacks multi-task layers over multi-scenario layers. This hierarchical design enables us to flexibly establish intrinsic connections between different scenarios, and at the same time also supports high-level feature extraction for different tasks. At each multi-scenario/multi-task layer, a novel expert selection algorithm is proposed to automatically identify scenario-/task-specific and shared experts for each input. Experiments over two real-world large-scale datasets demonstrate the effectiveness of AESM^{2} over a battery of strong baselines. Online A/B test also shows substantial performance gain on multiple metrics. Currently, AESM^{2} has been deployed online for serving major traffic.
A bi-criteria path planning algorithm for robotics applications
Jan 08, 2017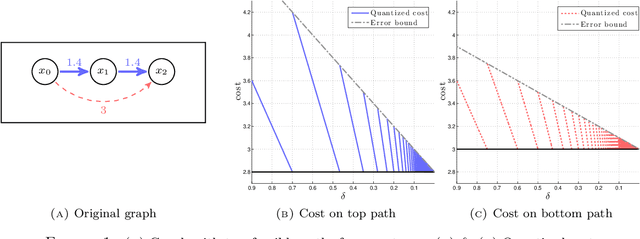

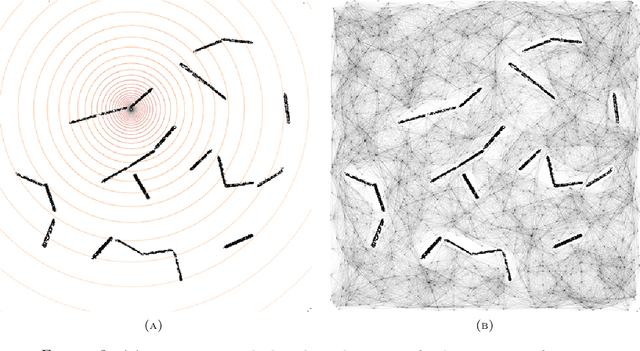
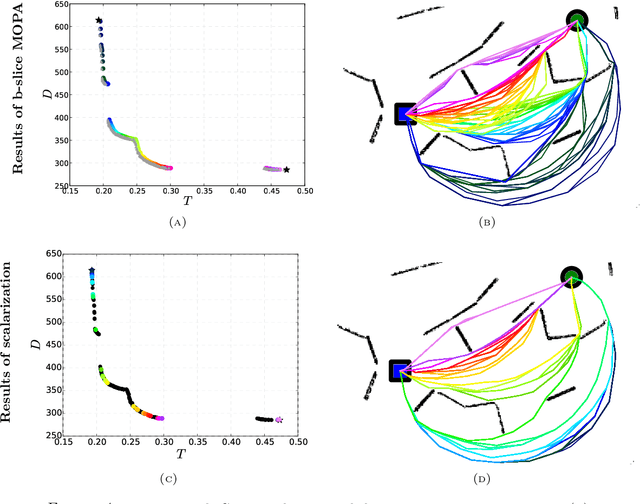
Realistic path planning applications often require optimizing with respect to several criteria simultaneously. Here we introduce an efficient algorithm for bi-criteria path planning on graphs. Our approach is based on augmenting the state space to keep track of the "budget" remaining to satisfy the constraints on secondary cost. The resulting augmented graph is acyclic and the primary cost can be then minimized by a simple upward sweep through budget levels. The efficiency and accuracy of our algorithm is tested on Probabilistic Roadmap graphs to minimize the distance of travel subject to a constraint on the overall threat exposure of the robot. We also present the results from field experiments illustrating the use of this approach on realistic robotic systems.