 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Kinesthetic Haptic Feedback Device Driven by Soft Electrohydraulic Actuators
Nov 27, 2024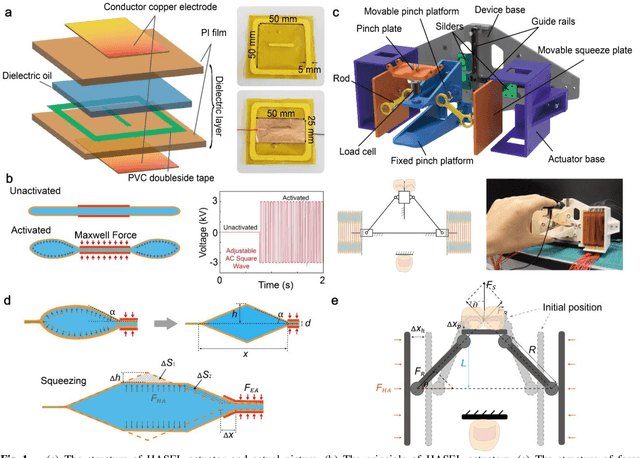
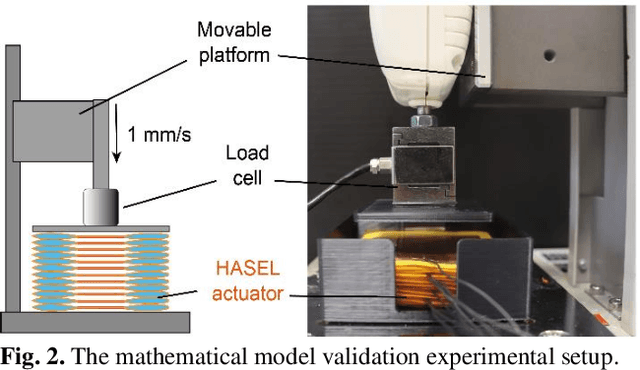
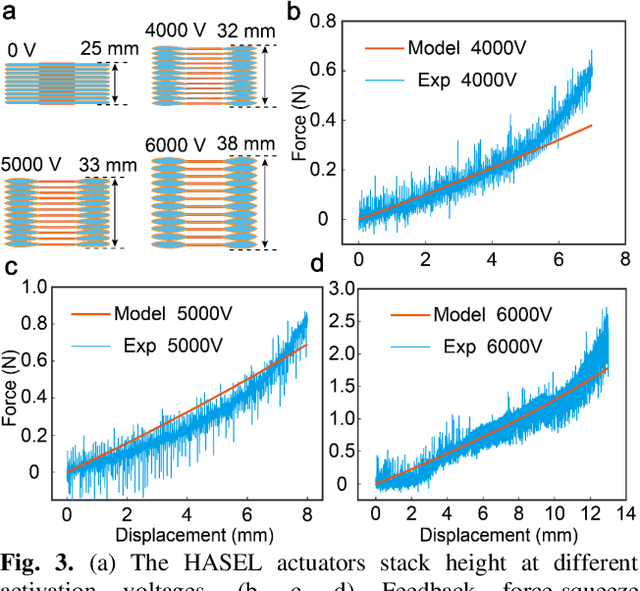
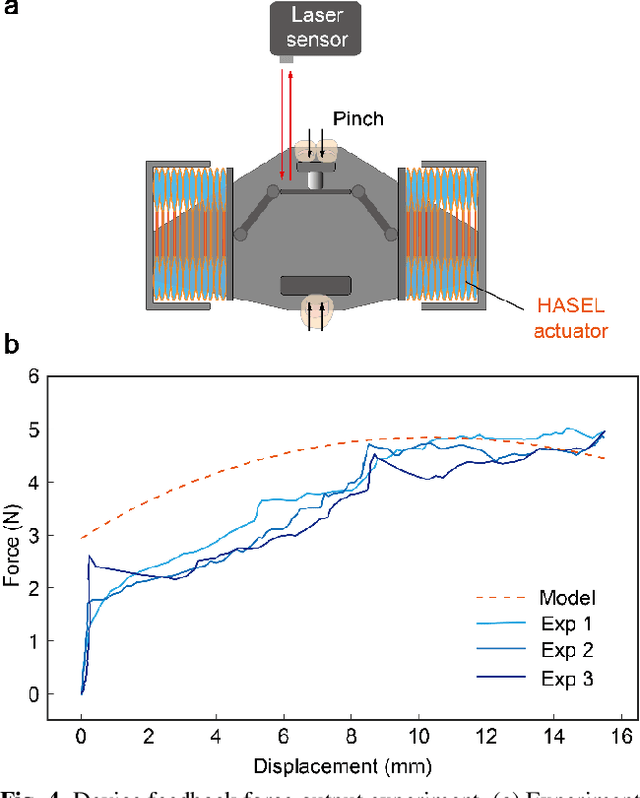
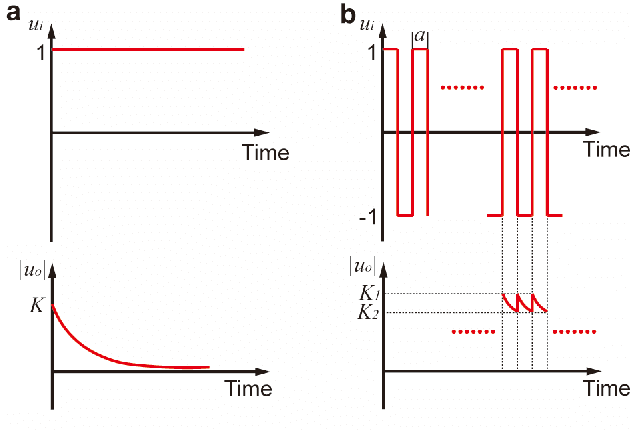
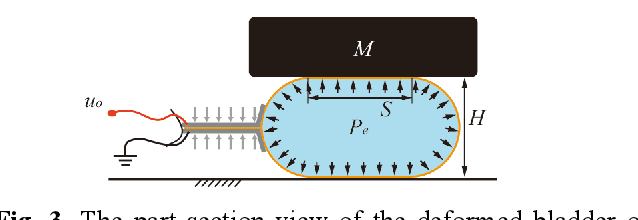
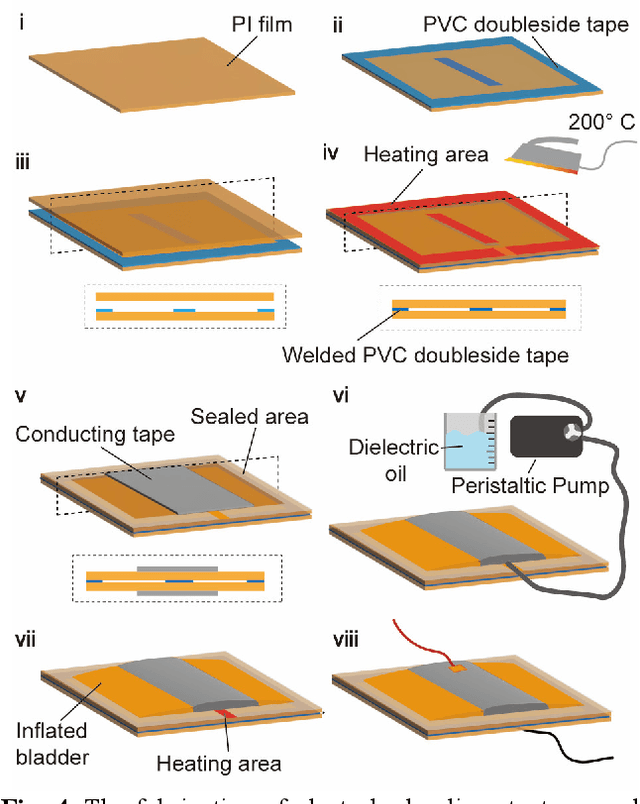
Developing kinesthetic haptic devices with advanced haptic rendering capabilities is challenging due to the limitations on driving mechanisms. In this study, we introduce a novel soft electrohydraulic actuator and develop a kinesthetic haptic device utilizing it as the driving unit. We established a mathematical model and conducted testing experiments to demonstrate the device's ability to stably output controllable feedback force. Our experiments also demonstrates that this device exhibits fast response characteristics. By utilizing the easily controllable nature of the soft electrohydraulic actuator, we were able to achieve high-resolution controllable feedback force output. Furthermore, by modulating the waveform of the driving high voltage, the device acquired the capability to render variable frequency haptic vibration without adding any extra vibration actuator. Using this kinesthetic haptic device, we built a teleoperated robotic system, showcasing the device's potential application as a haptic force feedback system in the field of robotics.
A Multimodal Soft Gripper with Variable Stiffness and Variable Gripping Range Based on MASH Actuator
Aug 10, 2024
Soft pneumatic actuators with integrated strain limiting layers have emerged as predominant components in the field of soft gripper technology for several decades. However, owing to their intrinsic strain-limiting layer design, these soft grippers possess a singular gripping functionality, rendering them incapable of adapting to diverse gripping tasks with different strategies. Based on our previous work, we introduce a novel soft gripper that offers variable stiffness, an adjustable gripping range, and multifunctionality. The MASH actuator based soft gripper can expand its gripping range up to threefold compared to the original configuration and ensures secure grip by enhancing stiffness when handling heavy objects. Moreover, it supports multitasking gripping through specific gripping strategy control.
AC-Driven Series Elastic Electrohydraulic Actuator for Stable and Smooth Displacement Output
Jan 25, 2024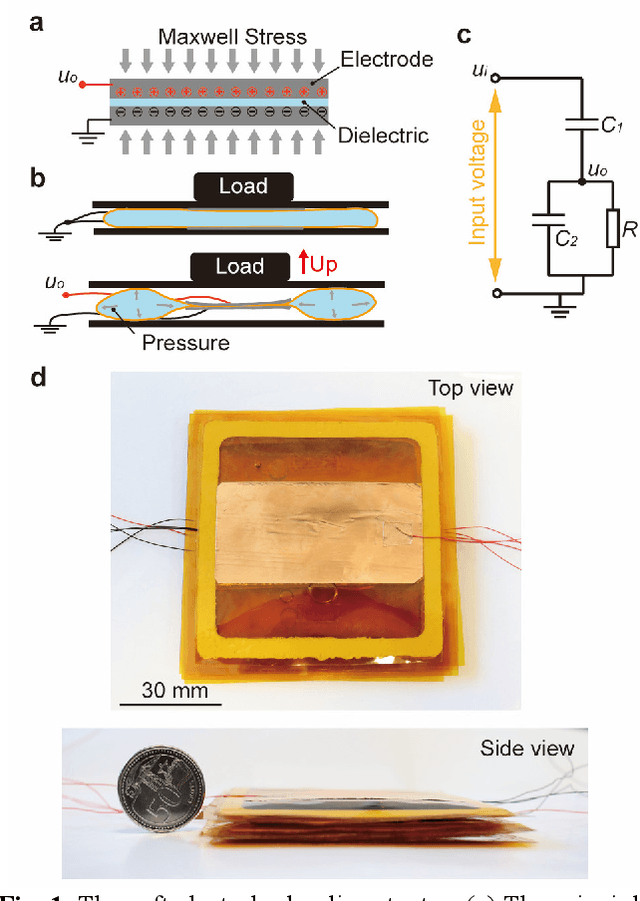
Soft electrohydraulic actuators known as HASEL actuators have attracted widespread research interest due to their outstanding dynamic performance and high output power. However, the displacement of electrohydraulic actuators usually declines with time under constant DC voltage, which hampers its prospective application. A mathematical model is firstly established to not only explain the decrease in displacement under DC voltage but also predict the relatively stable displacement with oscillation under AC square wave voltage. The mathematical model is validated since the actual displacement confirms the trend observed by our model. To smooth the displacement oscillation introduced by AC voltage, a serial elastic component is incorporated to form a SE-HASEL actuator. A feedback control with a proportion-integration algorithm enables the SE-HASEL actuator to eliminate the obstinate displacement hysteresis. Our results revealed that, through our methodology, the SE-HASEL actuator can give stable and smooth displacement and is capable of absorbing external impact disturbance simultaneously. A rotary joint based on the SE-HASEL actuator is developed to reflect its possibility to generate a common rotary motion for wide robotic applications. More importantly, this paper also proposes a highly accurate needle biopsy robot that can be utilized in MRI-guide surgical procedures. Overall, we have achieved AC-driven series elastic electrohydraulic actuators that can exhibit stable and smooth displacement output.
An Amphibious Fully-Soft Miniature Crawling Robot Powered by Electrohydraulic Fluid Kinetic Energy
Sep 20, 2023Miniature locomotion robots with the ability to navigate confined environments show great promise for a wide range of tasks, including search and rescue operations. Soft miniature locomotion robots, as a burgeoning field, have attracted significant research interest due to their exceptional terrain adaptability and safety features. In this paper, we introduce a fully-soft miniature crawling robot directly powered by fluid kinetic energy generated by an electrohydraulic actuator. Through optimization of the operating voltage and design parameters, the crawling velocity of the robot is dramatically enhanced, reaching 16 mm/s. The optimized robot weighs 6.3 g and measures 5 cm in length, 5 cm in width, and 6 mm in height. By combining two robots in parallel, the robot can achieve a turning rate of approximately 3 degrees/s. Additionally, by reconfiguring the distribution of electrodes in the electrohydraulic actuator, the robot can achieve 2 degrees-of-freedom translational motion, improving its maneuverability in narrow spaces. Finally, we demonstrate the use of a soft water-proof skin for underwater locomotion and actuation. In comparison with other soft miniature crawling robots, our robot with full softness can achieve relatively high crawling velocity as well as increased robustness and recovery.
OpenGSL: A Comprehensive Benchmark for Graph Structure Learning
Jun 17, 2023



Graph Neural Networks (GNNs) have emerged as the de facto standard for representation learning on graphs, owing to their ability to effectively integrate graph topology and node attributes. However, the inherent suboptimal nature of node connections, resulting from the complex and contingent formation process of graphs, presents significant challenges in modeling them effectively. To tackle this issue, Graph Structure Learning (GSL), a family of data-centric learning approaches, has garnered substantial attention in recent years. The core concept behind GSL is to jointly optimize the graph structure and the corresponding GNN models. Despite the proposal of numerous GSL methods, the progress in this field remains unclear due to inconsistent experimental protocols, including variations in datasets, data processing techniques, and splitting strategies. In this paper, we introduce OpenGSL, the first comprehensive benchmark for GSL, aimed at addressing this gap. OpenGSL enables a fair comparison among state-of-the-art GSL methods by evaluating them across various popular datasets using uniform data processing and splitting strategies. Through extensive experiments, we observe that existing GSL methods do not consistently outperform vanilla GNN counterparts. However, we do observe that the learned graph structure demonstrates a strong generalization ability across different GNN backbones, despite its high computational and space requirements. We hope that our open-sourced library will facilitate rapid and equitable evaluation and inspire further innovative research in the field of GSL. The code of the benchmark can be found in https://github.com/OpenGSL/OpenGSL.