 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabel-Occurrence-Balanced Mixup for Long-tailed Recognition
Oct 11, 2021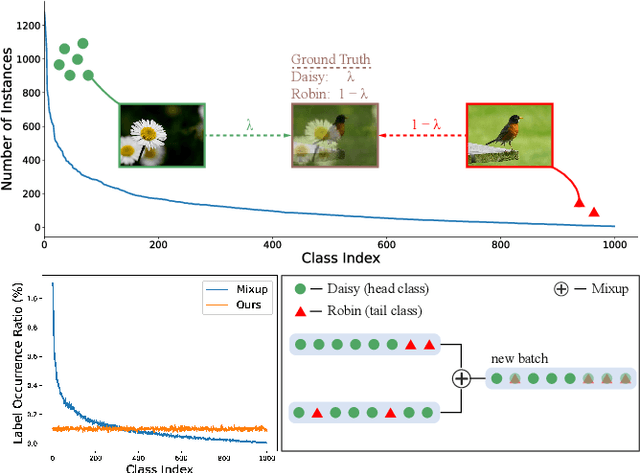
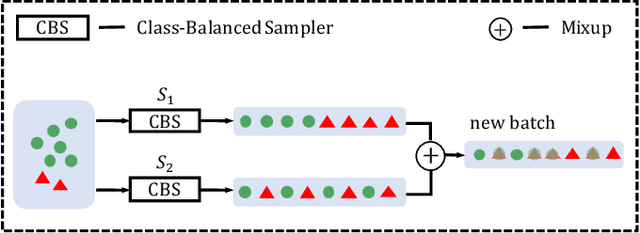
Mixup is a popular data augmentation method, with many variants subsequently proposed. These methods mainly create new examples via convex combination of random data pairs and their corresponding one-hot labels. However, most of them adhere to a random sampling and mixing strategy, without considering the frequency of label occurrence in the mixing process. When applying mixup to long-tailed data, a label suppression issue arises, where the frequency of label occurrence for each class is imbalanced and most of the new examples will be completely or partially assigned with head labels. The suppression effect may further aggravate the problem of data imbalance and lead to a poor performance on tail classes. To address this problem, we propose Label-Occurrence-Balanced Mixup to augment data while keeping the label occurrence for each class statistically balanced. In a word, we employ two independent class-balanced samplers to select data pairs and mix them to generate new data. We test our method on several long-tailed vision and sound recognition benchmarks. Experimental results show that our method significantly promotes the adaptability of mixup method to imbalanced data and achieves superior performance compared with state-of-the-art long-tailed learning methods.
RSDet++: Point-based Modulated Loss for More Accurate Rotated Object Detection
Sep 24, 2021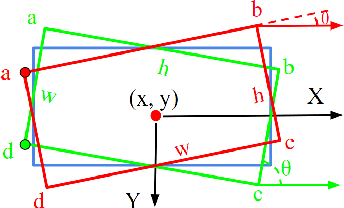
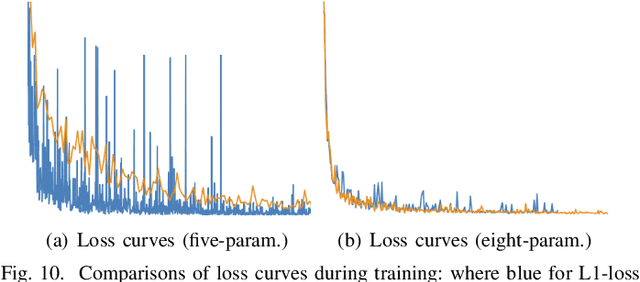
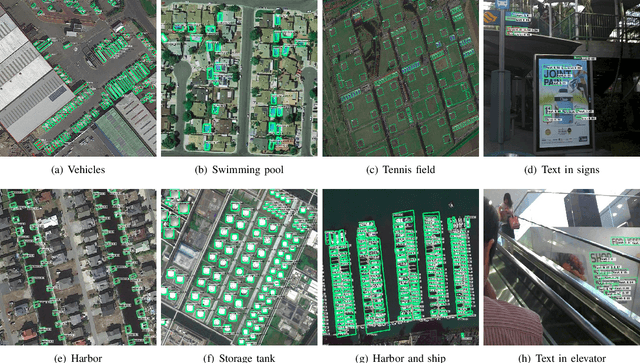
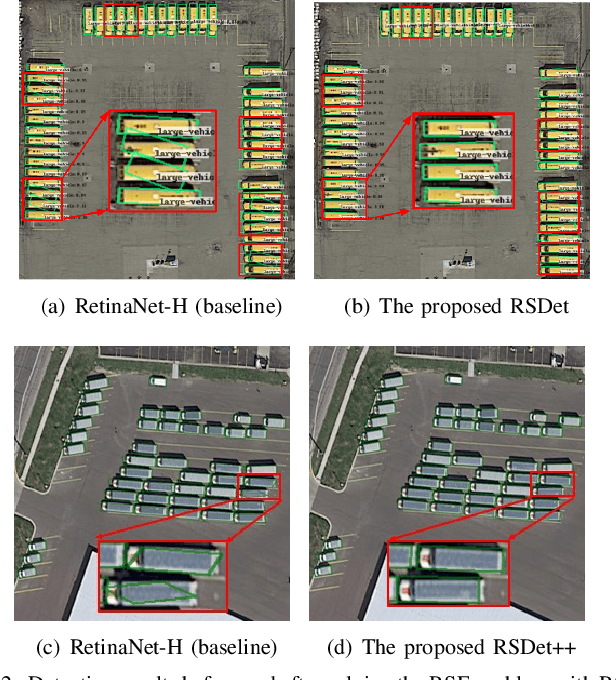
We classify the discontinuity of loss in both five-param and eight-param rotated object detection methods as rotation sensitivity error (RSE) which will result in performance degeneration. We introduce a novel modulated rotation loss to alleviate the problem and propose a rotation sensitivity detection network (RSDet) which is consists of an eight-param single-stage rotated object detector and the modulated rotation loss. Our proposed RSDet has several advantages: 1) it reformulates the rotated object detection problem as predicting the corners of objects while most previous methods employ a five-para-based regression method with different measurement units. 2) modulated rotation loss achieves consistent improvement on both five-param and eight-param rotated object detection methods by solving the discontinuity of loss. To further improve the accuracy of our method on objects smaller than 10 pixels, we introduce a novel RSDet++ which is consists of a point-based anchor-free rotated object detector and a modulated rotation loss. Extensive experiments demonstrate the effectiveness of both RSDet and RSDet++, which achieve competitive results on rotated object detection in the challenging benchmarks DOTA1.0, DOTA1.5, and DOTA2.0. We hope the proposed method can provide a new perspective for designing algorithms to solve rotated object detection and pay more attention to tiny objects. The codes and models are available at: https://github.com/yangxue0827/RotationDetection.