 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMake Full Use of Testing Information: An Integrated Accelerated Testing and Evaluation Method for Autonomous Driving Systems
Jan 21, 2025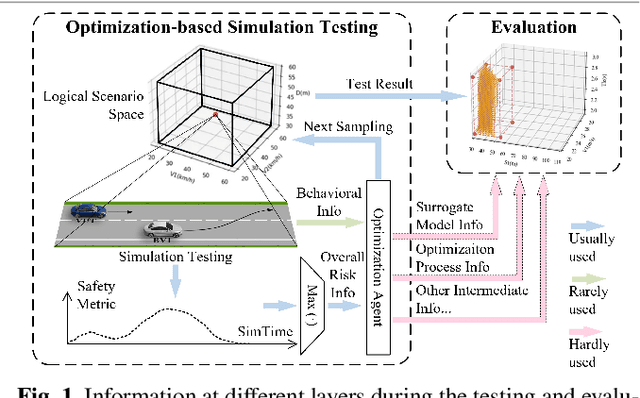
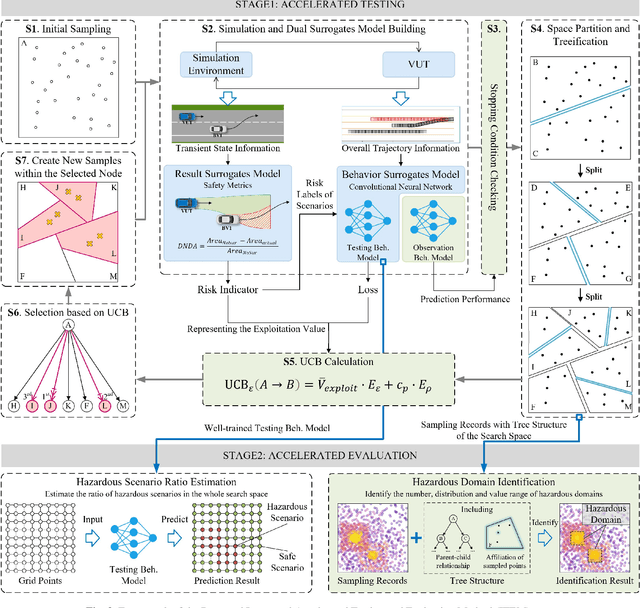
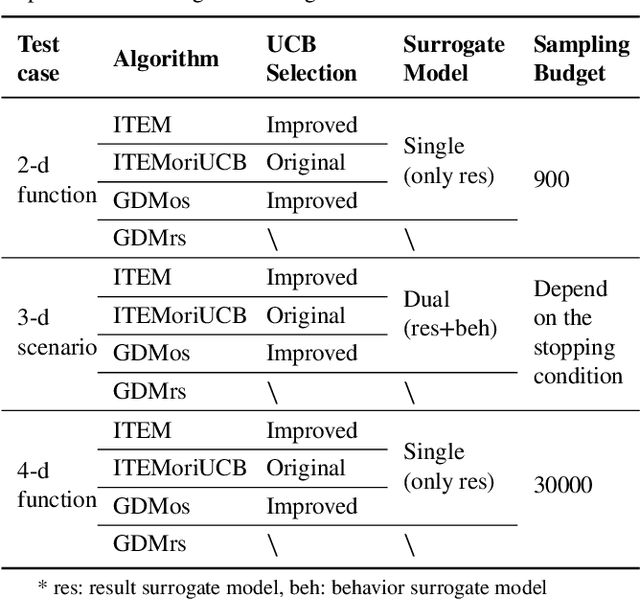
Testing and evaluation is an important step before the large-scale application of the autonomous driving systems (ADSs). Based on the three level of scenario abstraction theory, a testing can be performed within a logical scenario, followed by an evaluation stage which is inputted with the testing results of each concrete scenario generated from the logical parameter space. During the above process, abundant testing information is produced which is beneficial for comprehensive and accurate evaluations. To make full use of testing information, this paper proposes an Integrated accelerated Testing and Evaluation Method (ITEM). Based on a Monte Carlo Tree Search (MCTS) paradigm and a dual surrogates testing framework proposed in our previous work, this paper applies the intermediate information (i.e., the tree structure, including the affiliation of each historical sampled point with the subspaces and the parent-child relationship between subspaces) generated during the testing stage into the evaluation stage to achieve accurate hazardous domain identification. Moreover, to better serve this purpose, the UCB calculation method is improved to allow the search algorithm to focus more on the hazardous domain boundaries. Further, a stopping condition is constructed based on the convergence of the search algorithm. Ablation and comparative experiments are then conducted to verify the effectiveness of the improvements and the superiority of the proposed method. The experimental results show that ITEM could well identify the hazardous domains in both low- and high-dimensional cases, regardless of the shape of the hazardous domains, indicating its generality and potential for the safety evaluation of ADSs.
LAMBDA: Covering the Multimodal Critical Scenarios for Automated Driving Systems by Search Space Quantization
Nov 30, 2024



Scenario-based virtual testing is one of the most significant methods to test and evaluate the safety of automated driving systems (ADSs). However, it is impractical to enumerate all concrete scenarios in a logical scenario space and test them exhaustively. Recently, Black-Box Optimization (BBO) was introduced to accelerate the scenario-based test of ADSs by utilizing the historical test information to generate new test cases. However, a single optimum found by the BBO algorithm is insufficient for the purpose of a comprehensive safety evaluation of ADSs in a logical scenario. In fact, all the subspaces representing danger in the logical scenario space, rather than only the most critical concrete scenario, play a more significant role for the safety evaluation. Covering as many of the critical concrete scenarios in a logical scenario space through a limited number of tests is defined as the Black-Box Coverage (BBC) problem in this paper. We formalized this problem in a sample-based search paradigm and constructed a coverage criterion with Confusion Matrix Analysis. Furthermore, we propose LAMBDA (Latent-Action Monte-Carlo Beam Search with Density Adaption) to solve BBC problems. LAMBDA can quickly focus on critical subspaces by recursively partitioning the logical scenario space into accepted and rejected parts. Compared with its predecessor LaMCTS, LAMBDA introduces sampling density to overcome the sampling bias from optimization and Beam Search to obtain more parallelizability. Experimental results show that LAMBDA achieves state-of-the-art performance among all baselines and can reach at most 33 and 6000 times faster than Random Search to get 95% coverage of the critical areas in 2- and 5-dimensional synthetic functions, respectively. Experiments also demonstrate that LAMBDA has a promising future in the safety evaluation of ADSs in virtual tests.