 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMerNav: A Highly Generalizable Memory-Execute-Review Framework for Zero-Shot Object Goal Navigation
Feb 05, 2026Visual Language Navigation (VLN) is one of the fundamental capabilities for embodied intelligence and a critical challenge that urgently needs to be addressed. However, existing methods are still unsatisfactory in terms of both success rate (SR) and generalization: Supervised Fine-Tuning (SFT) approaches typically achieve higher SR, while Training-Free (TF) approaches often generalize better, but it is difficult to obtain both simultaneously. To this end, we propose a Memory-Execute-Review framework. It consists of three parts: a hierarchical memory module for providing information support, an execute module for routine decision-making and actions, and a review module for handling abnormal situations and correcting behavior. We validated the effectiveness of this framework on the Object Goal Navigation task. Across 4 datasets, our average SR achieved absolute improvements of 7% and 5% compared to all baseline methods under TF and Zero-Shot (ZS) settings, respectively. On the most commonly used HM3D_v0.1 and the more challenging open vocabulary dataset HM3D_OVON, the SR improved by 8% and 6%, under ZS settings. Furthermore, on the MP3D and HM3D_OVON datasets, our method not only outperformed all TF methods but also surpassed all SFT methods, achieving comprehensive leadership in both SR (5% and 2%) and generalization.
AMap: Distilling Future Priors for Ahead-Aware Online HD Map Construction
Dec 22, 2025



Online High-Definition (HD) map construction is pivotal for autonomous driving. While recent approaches leverage historical temporal fusion to improve performance, we identify a critical safety flaw in this paradigm: it is inherently ``spatially backward-looking." These methods predominantly enhance map reconstruction in traversed areas, offering minimal improvement for the unseen road ahead. Crucially, our analysis of downstream planning tasks reveals a severe asymmetry: while rearward perception errors are often tolerable, inaccuracies in the forward region directly precipitate hazardous driving maneuvers. To bridge this safety gap, we propose AMap, a novel framework for Ahead-aware online HD Mapping. We pioneer a ``distill-from-future" paradigm, where a teacher model with privileged access to future temporal contexts guides a lightweight student model restricted to the current frame. This process implicitly compresses prospective knowledge into the student model, endowing it with ``look-ahead" capabilities at zero inference-time cost. Technically, we introduce a Multi-Level BEV Distillation strategy with spatial masking and an Asymmetric Query Adaptation module to effectively transfer future-aware representations to the student's static queries. Extensive experiments on the nuScenes and Argoverse 2 benchmark demonstrate that AMap significantly enhances current-frame perception. Most notably, it outperforms state-of-the-art temporal models in critical forward regions while maintaining the efficiency of single current frame inference.
JanusVLN: Decoupling Semantics and Spatiality with Dual Implicit Memory for Vision-Language Navigation
Sep 26, 2025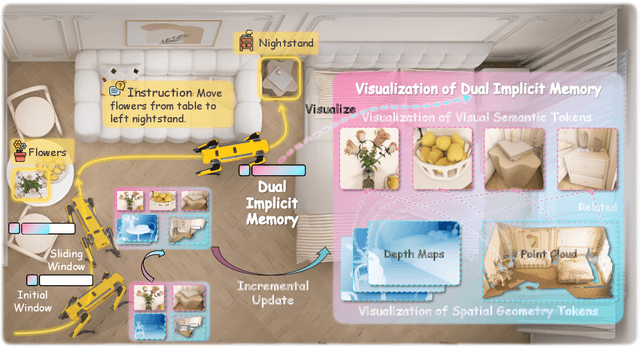
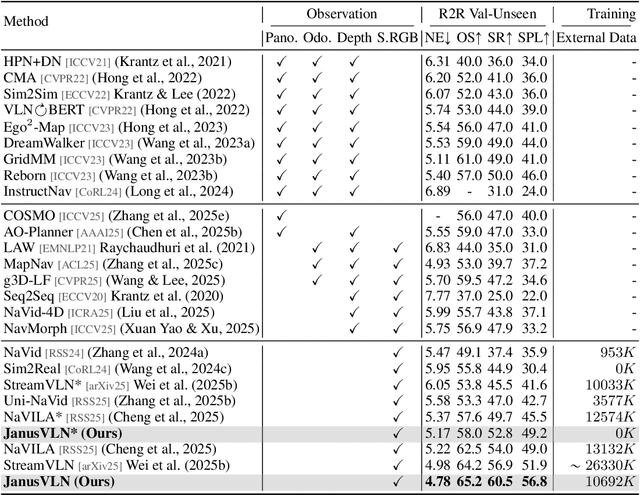
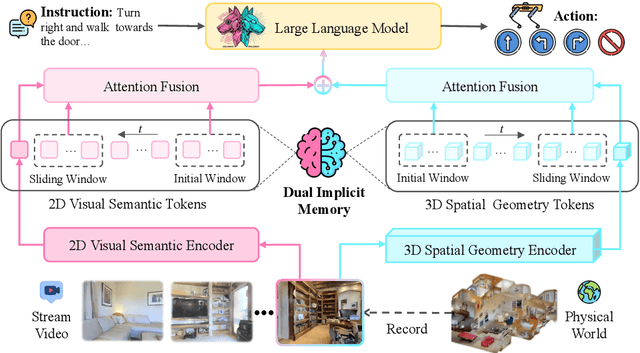
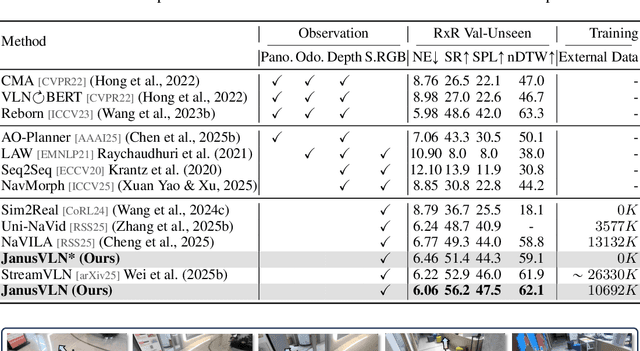
Vision-and-Language Navigation requires an embodied agent to navigate through unseen environments, guided by natural language instructions and a continuous video stream. Recent advances in VLN have been driven by the powerful semantic understanding of Multimodal Large Language Models. However, these methods typically rely on explicit semantic memory, such as building textual cognitive maps or storing historical visual frames. This type of method suffers from spatial information loss, computational redundancy, and memory bloat, which impede efficient navigation. Inspired by the implicit scene representation in human navigation, analogous to the left brain's semantic understanding and the right brain's spatial cognition, we propose JanusVLN, a novel VLN framework featuring a dual implicit neural memory that models spatial-geometric and visual-semantic memory as separate, compact, and fixed-size neural representations. This framework first extends the MLLM to incorporate 3D prior knowledge from the spatial-geometric encoder, thereby enhancing the spatial reasoning capabilities of models based solely on RGB input. Then, the historical key-value caches from the spatial-geometric and visual-semantic encoders are constructed into a dual implicit memory. By retaining only the KVs of tokens in the initial and sliding window, redundant computation is avoided, enabling efficient incremental updates. Extensive experiments demonstrate that JanusVLN outperforms over 20 recent methods to achieve SOTA performance. For example, the success rate improves by 10.5-35.5 compared to methods using multiple data types as input and by 3.6-10.8 compared to methods using more RGB training data. This indicates that the proposed dual implicit neural memory, as a novel paradigm, explores promising new directions for future VLN research. Ours project page: https://miv-xjtu.github.io/JanusVLN.github.io/.
UniMapGen: A Generative Framework for Large-Scale Map Construction from Multi-modal Data
Sep 26, 2025Large-scale map construction is foundational for critical applications such as autonomous driving and navigation systems. Traditional large-scale map construction approaches mainly rely on costly and inefficient special data collection vehicles and labor-intensive annotation processes. While existing satellite-based methods have demonstrated promising potential in enhancing the efficiency and coverage of map construction, they exhibit two major limitations: (1) inherent drawbacks of satellite data (e.g., occlusions, outdatedness) and (2) inefficient vectorization from perception-based methods, resulting in discontinuous and rough roads that require extensive post-processing. This paper presents a novel generative framework, UniMapGen, for large-scale map construction, offering three key innovations: (1) representing lane lines as \textbf{discrete sequence} and establishing an iterative strategy to generate more complete and smooth map vectors than traditional perception-based methods. (2) proposing a flexible architecture that supports \textbf{multi-modal} inputs, enabling dynamic selection among BEV, PV, and text prompt, to overcome the drawbacks of satellite data. (3) developing a \textbf{state update} strategy for global continuity and consistency of the constructed large-scale map. UniMapGen achieves state-of-the-art performance on the OpenSatMap dataset. Furthermore, UniMapGen can infer occluded roads and predict roads missing from dataset annotations. Our code will be released.
Driving by Hybrid Navigation: An Online HD-SD Map Association Framework and Benchmark for Autonomous Vehicles
Jul 10, 2025



Autonomous vehicles rely on global standard-definition (SD) maps for road-level route planning and online local high-definition (HD) maps for lane-level navigation. However, recent work concentrates on construct online HD maps, often overlooking the association of global SD maps with online HD maps for hybrid navigation, making challenges in utilizing online HD maps in the real world. Observing the lack of the capability of autonomous vehicles in navigation, we introduce \textbf{O}nline \textbf{M}ap \textbf{A}ssociation, the first benchmark for the association of hybrid navigation-oriented online maps, which enhances the planning capabilities of autonomous vehicles. Based on existing datasets, the OMA contains 480k of roads and 260k of lane paths and provides the corresponding metrics to evaluate the performance of the model. Additionally, we propose a novel framework, named Map Association Transformer, as the baseline method, using path-aware attention and spatial attention mechanisms to enable the understanding of geometric and topological correspondences. The code and dataset can be accessed at https://github.com/WallelWan/OMA-MAT.
FutureSightDrive: Thinking Visually with Spatio-Temporal CoT for Autonomous Driving
May 23, 2025Visual language models (VLMs) have attracted increasing interest in autonomous driving due to their powerful reasoning capabilities. However, existing VLMs typically utilize discrete text Chain-of-Thought (CoT) tailored to the current scenario, which essentially represents highly abstract and symbolic compression of visual information, potentially leading to spatio-temporal relationship ambiguity and fine-grained information loss. Is autonomous driving better modeled on real-world simulation and imagination than on pure symbolic logic? In this paper, we propose a spatio-temporal CoT reasoning method that enables models to think visually. First, VLM serves as a world model to generate unified image frame for predicting future world states: where perception results (e.g., lane divider and 3D detection) represent the future spatial relationships, and ordinary future frame represent the temporal evolution relationships. This spatio-temporal CoT then serves as intermediate reasoning steps, enabling the VLM to function as an inverse dynamics model for trajectory planning based on current observations and future predictions. To implement visual generation in VLMs, we propose a unified pretraining paradigm integrating visual generation and understanding, along with a progressive visual CoT enhancing autoregressive image generation. Extensive experimental results demonstrate the effectiveness of the proposed method, advancing autonomous driving towards visual reasoning.
Driving by the Rules: A Benchmark for Integrating Traffic Sign Regulations into Vectorized HD Map
Oct 31, 2024



Ensuring adherence to traffic sign regulations is essential for both human and autonomous vehicle navigation. While current benchmark datasets concentrate on lane perception or basic traffic sign recognition, they often overlook the intricate task of integrating these regulations into lane operations. Addressing this gap, we introduce MapDR, a novel dataset designed for the extraction of Driving Rules from traffic signs and their association with vectorized, locally perceived HD Maps. MapDR features over 10,000 annotated video clips that capture the intricate correlation between traffic sign regulations and lanes. We define two pivotal sub-tasks: 1) Rule Extraction from Traffic Sign, which accurately deciphers regulatory instructions, and 2) Rule-Lane Correspondence Reasoning, which aligns these rules with their respective lanes. Built upon this benchmark, we provide a multimodal solution that offers a strong baseline for advancing autonomous driving technologies. It fills a critical gap in the integration of traffic sign rules, contributing to the development of reliable autonomous navigation systems.
Driving with Prior Maps: Unified Vector Prior Encoding for Autonomous Vehicle Mapping
Sep 11, 2024



High-Definition Maps (HD maps) are essential for the precise navigation and decision-making of autonomous vehicles, yet their creation and upkeep present significant cost and timeliness challenges. The online construction of HD maps using on-board sensors has emerged as a promising solution; however, these methods can be impeded by incomplete data due to occlusions and inclement weather. This paper proposes the PriorDrive framework to addresses these limitations by harnessing the power of prior maps, significantly enhancing the robustness and accuracy of online HD map construction. Our approach integrates a variety of prior maps, such as OpenStreetMap's Standard Definition Maps (SD maps), outdated HD maps from vendors, and locally constructed maps from historical vehicle data. To effectively encode this prior information into online mapping models, we introduce a Hybrid Prior Representation (HPQuery) that standardizes the representation of diverse map elements. At the core of PriorDrive is the Unified Vector Encoder (UVE), which employs a dual encoding mechanism to process vector data. The intra-vector encoder captures fine-grained local features, while the inter-vector encoder integrates global context. Furthermore, we propose a segment-level and point-level pre-training strategy that enables the UVE to learn the prior distribution of vector data, thereby improving the encoder's generalizability and performance. Through extensive testing on the nuScenes dataset, we demonstrate that PriorDrive is highly compatible with various online mapping models and substantially improves map prediction capabilities. The integration of prior maps through the PriorDrive framework offers a robust solution to the challenges of single-perception data, paving the way for more reliable autonomous vehicle navigation.
Few-Shot Class-Incremental Learning
Apr 24, 2020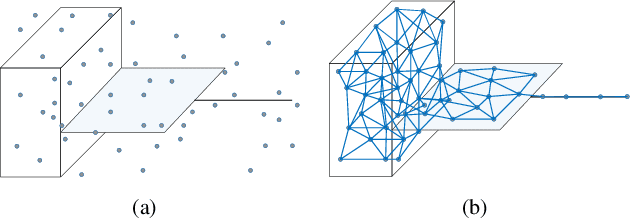

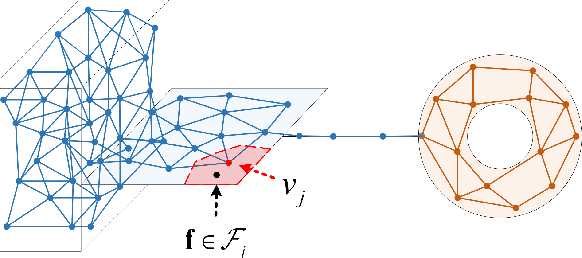
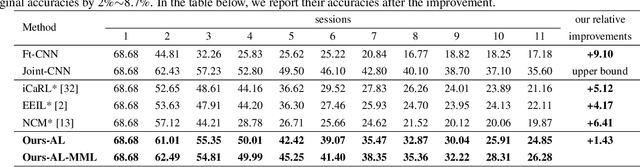
The ability to incrementally learn new classes is crucial to the development of real-world artificial intelligence systems. In this paper, we focus on a challenging but practical few-shot class-incremental learning (FSCIL) problem. FSCIL requires CNN models to incrementally learn new classes from very few labelled samples, without forgetting the previously learned ones. To address this problem, we represent the knowledge using a neural gas (NG) network, which can learn and preserve the topology of the feature manifold formed by different classes. On this basis, we propose the TOpology-Preserving knowledge InCrementer (TOPIC) framework. TOPIC mitigates the forgetting of the old classes by stabilizing NG's topology and improves the representation learning for few-shot new classes by growing and adapting NG to new training samples. Comprehensive experimental results demonstrate that our proposed method significantly outperforms other state-of-the-art class-incremental learning methods on CIFAR100, miniImageNet, and CUB200 datasets.