 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverTwin: Solving Inverse Problems via Differentiable Radio Frequency Digital Twin
Aug 19, 2025Digital twins (DTs), virtual simulated replicas of physical scenes, are transforming various industries. However, their potential in radio frequency (RF) sensing applications has been limited by the unidirectional nature of conventional RF simulators. In this paper, we present InverTwin, an optimization-driven framework that creates RF digital twins by enabling bidirectional interaction between virtual and physical realms. InverTwin overcomes the fundamental differentiability challenges of RF optimization problems through novel design components, including path-space differentiation to address discontinuity in complex simulation functions, and a radar surrogate model to mitigate local non-convexity caused by RF signal periodicity. These techniques enable smooth gradient propagation and robust optimization of the DT model. Our implementation and experiments demonstrate InverTwin's versatility and effectiveness in augmenting both data-driven and model-driven RF sensing systems for DT reconstruction.
Closer to Language than Steam: AI as the Cognitive Engine of a New Productivity Revolution
Jun 12, 2025Artificial Intelligence (AI) is reframed as a cognitive engine driving a novel productivity revolution distinct from the Industrial Revolution's physical thrust. This paper develops a theoretical framing of AI as a cognitive revolution akin to written language - a transformative augmentation of human intellect rather than another mechanized tool. We compare AI's emergence to historical leaps in information technology to show how it amplifies knowledge work. Examples from various domains demonstrate AI's impact as a driver of productivity in cognitive tasks. We adopt a multidisciplinary perspective combining computer science advances with economic insights and sociological perspectives on how AI reshapes work and society. Through conceptual frameworks, we visualize the shift from manual to cognitive productivity. Our central argument is that AI functions as an engine of cognition - comparable to how human language revolutionized knowledge - heralding a new productivity paradigm. We discuss how this revolution demands rethinking of skills, organizations, and policies. This paper, balancing academic rigor with clarity, concludes that AI's promise lies in complementing human cognitive abilities, marking a new chapter in productivity evolution.
Anchoring AI Capabilities in Market Valuations: The Capability Realization Rate Model and Valuation Misalignment Risk
May 15, 2025Recent breakthroughs in artificial intelligence (AI) have triggered surges in market valuations for AI-related companies, often outpacing the realization of underlying capabilities. We examine the anchoring effect of AI capabilities on equity valuations and propose a Capability Realization Rate (CRR) model to quantify the gap between AI potential and realized performance. Using data from the 2023--2025 generative AI boom, we analyze sector-level sensitivity and conduct case studies (OpenAI, Adobe, NVIDIA, Meta, Microsoft, Goldman Sachs) to illustrate patterns of valuation premium and misalignment. Our findings indicate that AI-native firms commanded outsized valuation premiums anchored to future potential, while traditional companies integrating AI experienced re-ratings subject to proof of tangible returns. We argue that CRR can help identify valuation misalignment risk-where market prices diverge from realized AI-driven value. We conclude with policy recommendations to improve transparency, mitigate speculative bubbles, and align AI innovation with sustainable market value.
Differentiable Radio Frequency Ray Tracing for Millimeter-Wave Sensing
Nov 22, 2023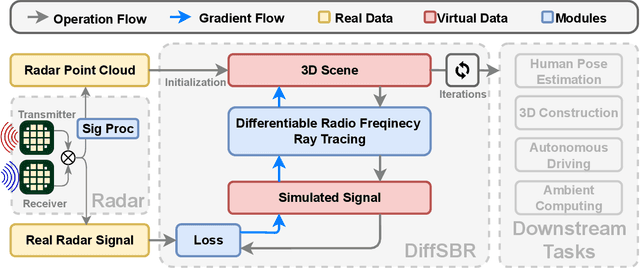

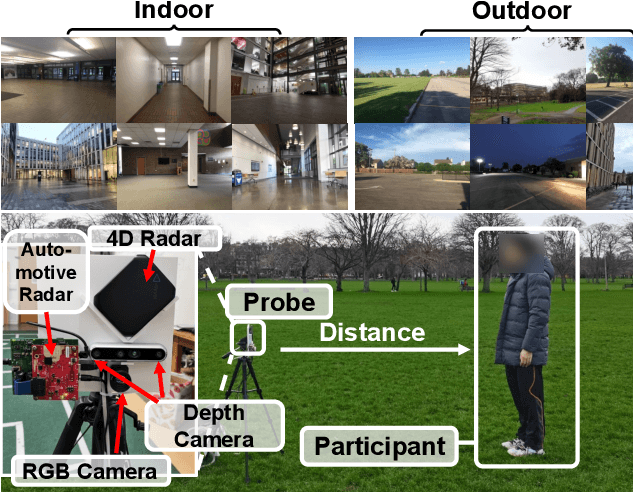
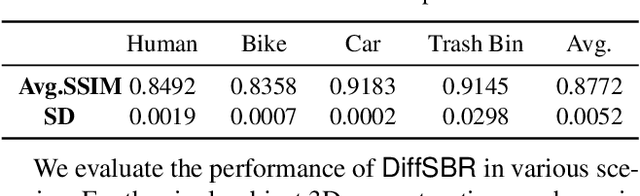
Millimeter wave (mmWave) sensing is an emerging technology with applications in 3D object characterization and environment mapping. However, realizing precise 3D reconstruction from sparse mmWave signals remains challenging. Existing methods rely on data-driven learning, constrained by dataset availability and difficulty in generalization. We propose DiffSBR, a differentiable framework for mmWave-based 3D reconstruction. DiffSBR incorporates a differentiable ray tracing engine to simulate radar point clouds from virtual 3D models. A gradient-based optimizer refines the model parameters to minimize the discrepancy between simulated and real point clouds. Experiments using various radar hardware validate DiffSBR's capability for fine-grained 3D reconstruction, even for novel objects unseen by the radar previously. By integrating physics-based simulation with gradient optimization, DiffSBR transcends the limitations of data-driven approaches and pioneers a new paradigm for mmWave sensing.