 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Thermoplastic Elastomer Belt Based Robotic Gripper
Jun 24, 2020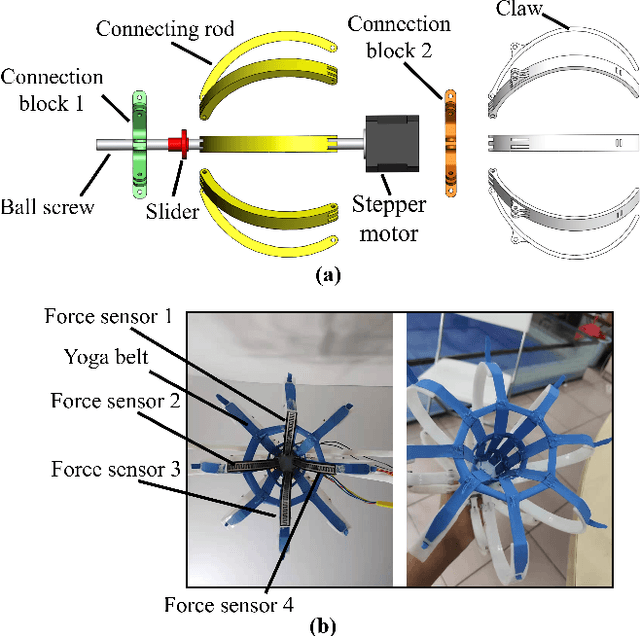
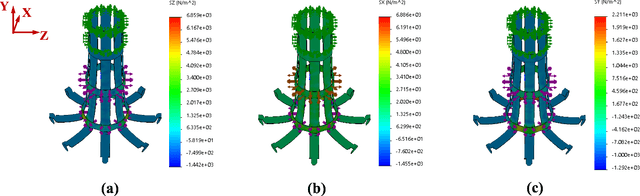
Novel robotic grippers have captured increasing interests recently because of their abilities to adapt to varieties of circumstances and their powerful functionalities. Differing from traditional gripper with mechanical components-made fingers, novel robotic grippers are typically made of novel structures and materials, using a novel manufacturing process. In this paper, a novel robotic gripper with external frame and internal thermoplastic elastomer belt-made net is proposed. The gripper grasps objects using the friction between the net and objects. It has the ability of adaptive gripping through flexible contact surface. Stress simulation has been used to explore the regularity between the normal stress on the net and the deformation of the net. Experiments are conducted on a variety of objects to measure the force needed to reliably grip and hold the object. Test results show that the gripper can successfully grip objects with varying shape, dimensions, and textures. It is promising that the gripper can be used for grasping fragile objects in the industry or out in the field, and also grasping the marine organisms without hurting them.
Artificial Lateral Line Based Relative State Estimation for Two Adjacent Robotic Fish
Jun 23, 2020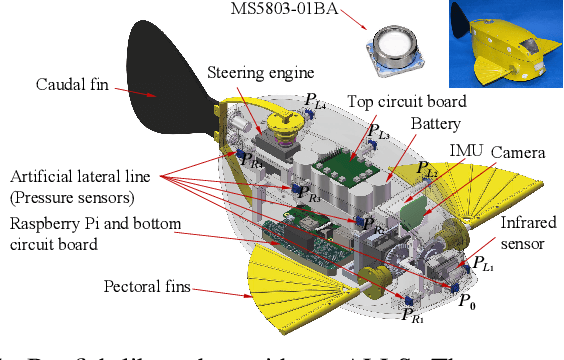
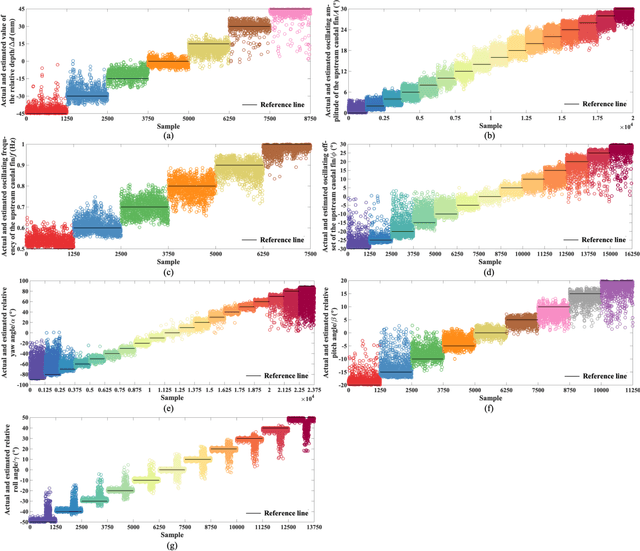
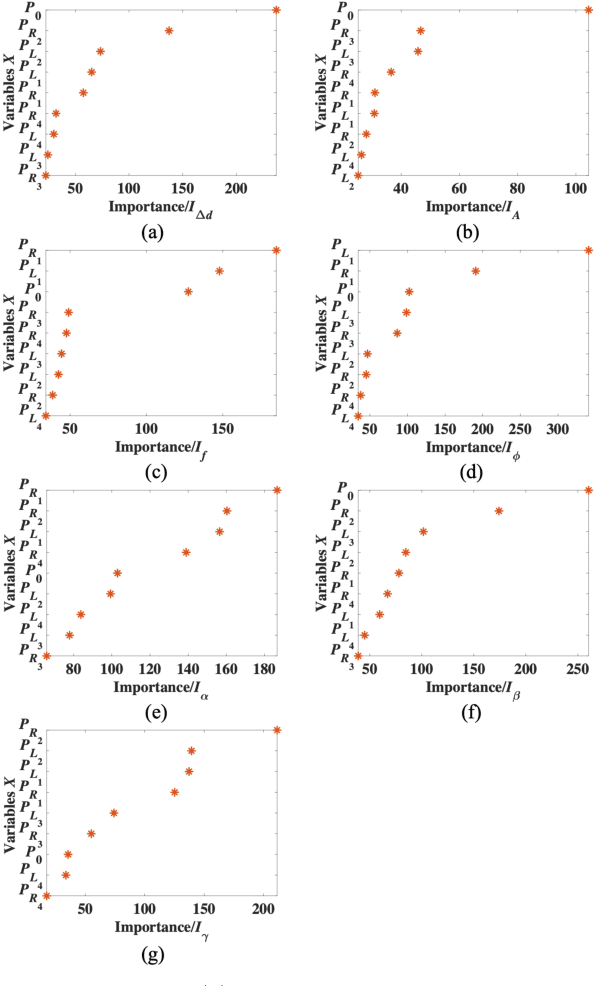
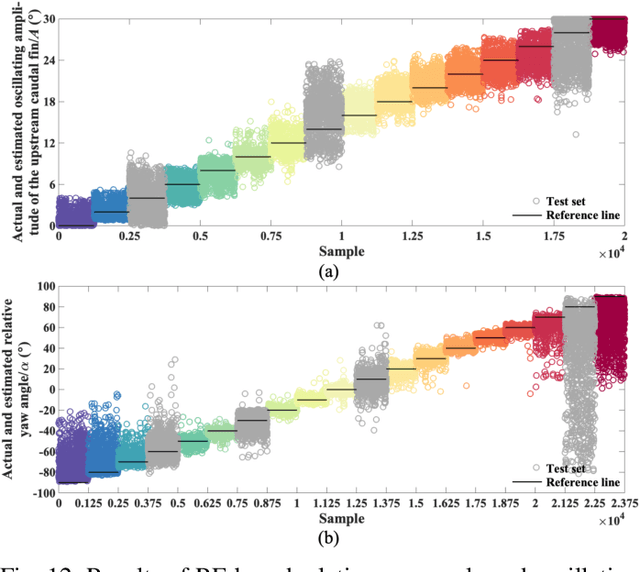
The lateral line enables fish to efficiently sense the surrounding environment, thus assisting flow-related fish behaviours. Inspired by this phenomenon, varieties of artificial lateral line systems (ALLSs) have been developed and applied to underwater robots. This article focuses on using the pressure sensor arrays based on ALLS-measured hydrodynamic pressure variations (HPVs) for estimating the relative state between two adjacent robotic fish with leader-follower formation. The relative states include the relative oscillating frequency, amplitude, and offset of the upstream robotic fish to the downstream robotic fish, the relative vertical distance, the relative yaw angle, the relative pitch angle, and the relative roll angle between the two adjacent robotic fish. Regression model between the ALLS-measured and the mentioned relative states is investigated, and regression model-based relative state estimation is conducted. Specifically, two criteria are proposed firstly to investigate not only the sensitivity of each pressure sensor to the variations of relative state but also the insufficiency and redundancy of the pressure sensors. And thus the pressure sensors used for regression analysis are determined. Then four typical regression methods, including random forest algorithm, support vector regression, back propagation neural network, and multiple linear regression method are used for establishing regression models between the ALLS-measured HPVs and the relative states. Then regression effects of the four methods are compared and discussed. Finally, random forest-based method, which has the best regression effect, is used to estimate relative yaw angle and oscillating amplitude using the ALLS-measured HPVs and exhibits excellent estimation performance. This work contributes to local relative estimation for a group of underwater robots, which has always been a challenge.
Three-Dimensional Dynamic Modeling and Motion Analysis for an Active-Tail-Actuated Robotic Fish with Barycentre Regulating Mechanism
Jun 23, 2020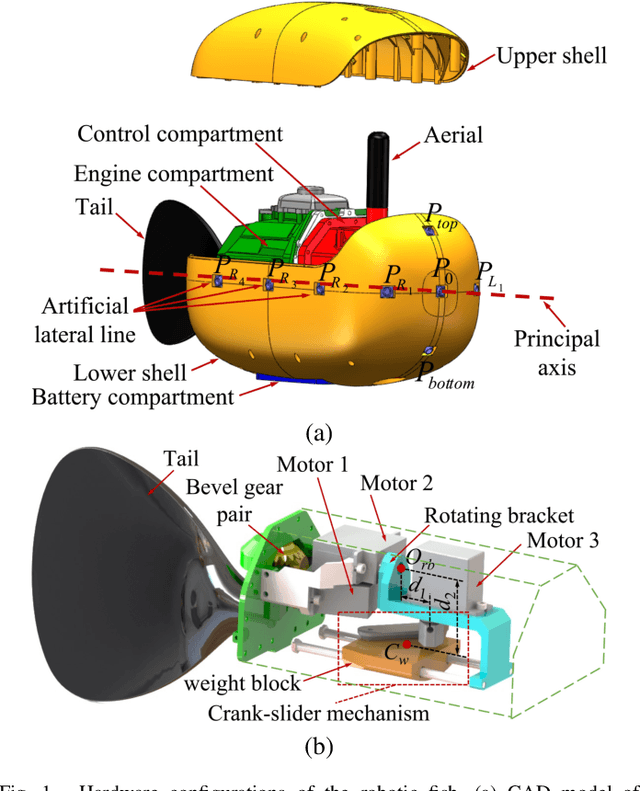
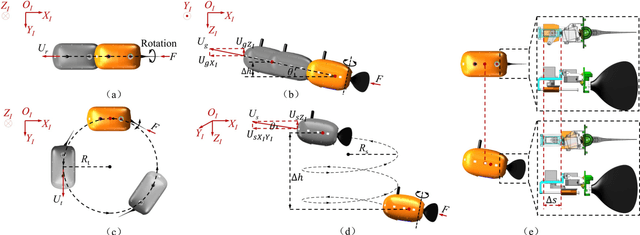
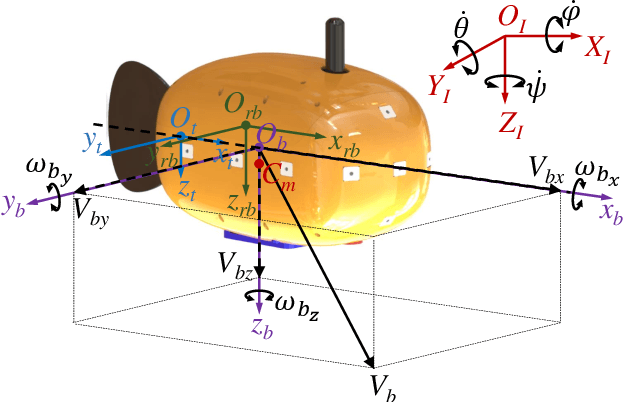
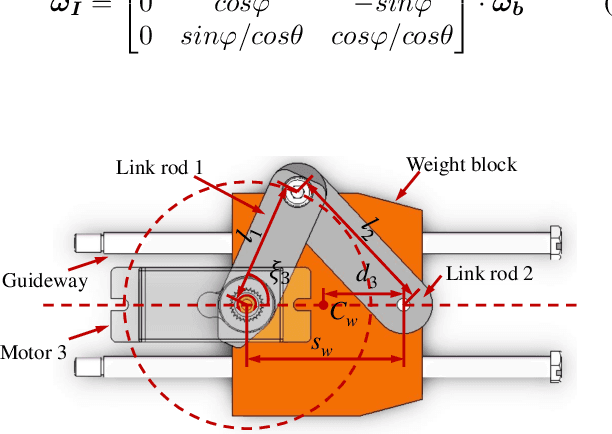
Dynamic modeling has been capturing attention for its fundamentality in precise locomotion analyses and control of underwater robots. However, the existing researches have mainly focused on investigating two-dimensional motion of underwater robots, and little attention has been paid to three-dimensional dynamic modeling, which is just what we focus on. In this article, a three-dimensional dynamic model of an active-tail-actuated robotic fish with a barycentre regulating mechanism is built by combining Newton's second law for linear motion and Euler's equation for angular motion. The model parameters are determined by three-dimensional computer-aided design (CAD) software SolidWorks, HyperFlow-based computational fluid dynamics (CFD) simulation, and grey-box model estimation method. Both kinematic experiments with a prototype and numerical simulations are applied to validate the accuracy of the dynamic model mutually. Based on the dynamic model, multiple three-dimensional motions, including rectilinear motion, turning motion, gliding motion, and spiral motion, are analyzed. The experimental and simulation results demonstrate the effectiveness of the proposed model in evaluating the trajectory, attitude, and motion parameters, including the velocity, turning radius, angular velocity, etc., of the robotic fish.
Fish lateral line inspired perception and flow-aided control: A review
Jun 22, 2020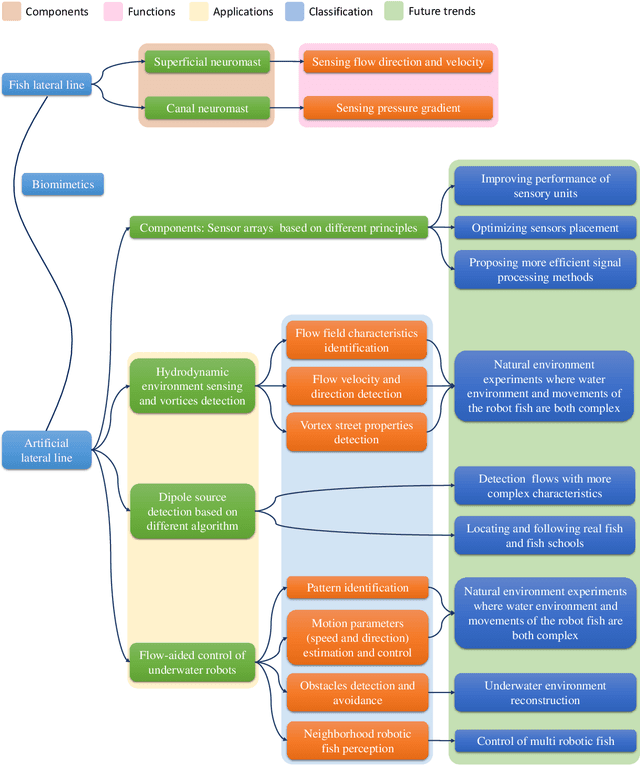
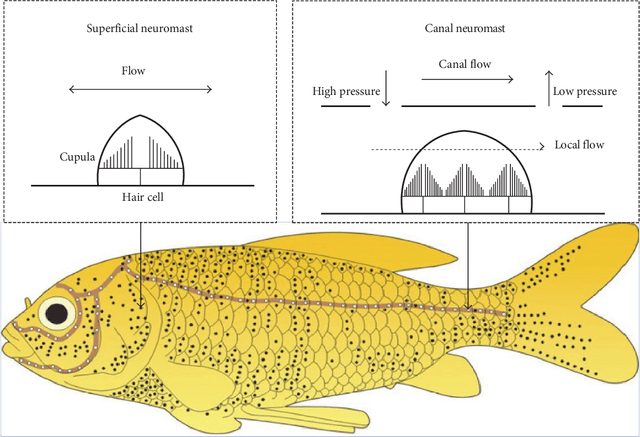
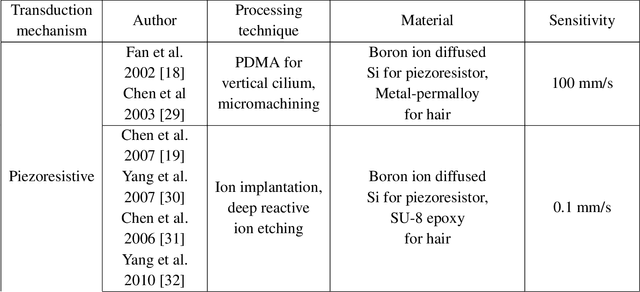
Any phenomenon in nature is potential to be an inspiration for us to propose new ideas. Lateral line is a typical example which has attracted more interest in recent years. With the aid of lateral line, fish is capable of acquiring fluid information around, which is of great significance for them to survive, communicate and hunt underwater. In this paper, we briefly introduce the morphology and mechanism of the lateral line first. Then we focus on the development of artificial lateral line which typically consists of an array of sensors and can be installed on underwater robots. A series of sensors inspired by the lateral line with different sensing principles have been summarized. And then the applications of artificial lateral line system in hydrodynamic environment sensing and vortices detection, dipole oscillation source detection, and autonomous control of underwater robots have been surveyed. In addition, the existing problems and future foci in the field have been further discussed in detail. The current works and future foci have demonstrated that artificial lateral line has great potentials of research and contributes to the applications of underwater robots.