 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Design and Simulation of Biomimetic Fish Robot for Aquatic Creature Study
Oct 13, 2021In the application of underwater creature study, comparing with propeller-powered ROVs and servo motor actuated robotic fish, novel biomimetic fish robot designs with soft actuation structure could interact with aquatic creatures closely and record authentic habitats and behaviours. This final project report presents the detailed design process of a hydraulic soft actuator powered robotic fish for aquatic creature study capable of swimming along the 3D trajectory. The robotic fish is designed based on the analysis of the pro and cons of existing designs. Except for the mechanical and electronic designs and manufacturing method of crucial components, a simplified open-loop control algorithm was designed to check the functionality of the application board and microcontroller in the Proteus simulation environment. As the key component of the robotic fish, Finite Element Method (FEM) simulations were conducted to visualise the soft actuator's deformation under different pressure to validate the design. Computational Fluid Dynamics (CFD) simulations were also conducted to improve the hydrodynamic efficiency of the shape of robotic fish. Although physical manufacturing is impossible due to the pandemic, the simulations show overall good performance in terms of control, actuation, and hydrodynamic efficiency.
A Thermoplastic Elastomer Belt Based Robotic Gripper
Jun 24, 2020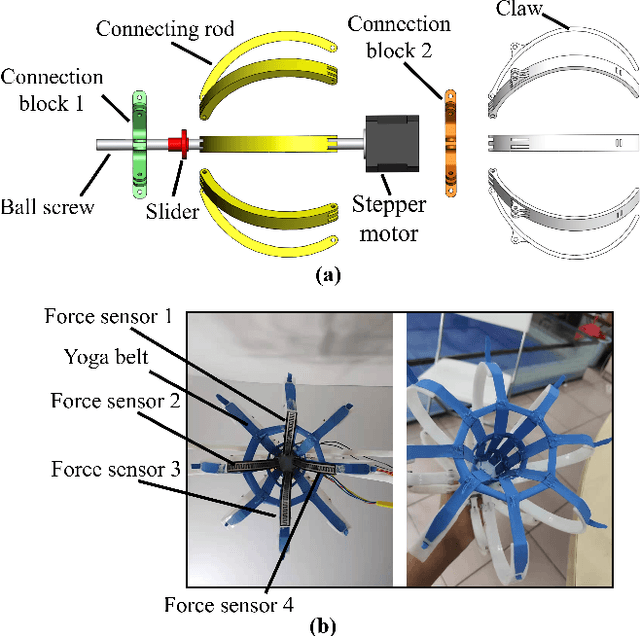
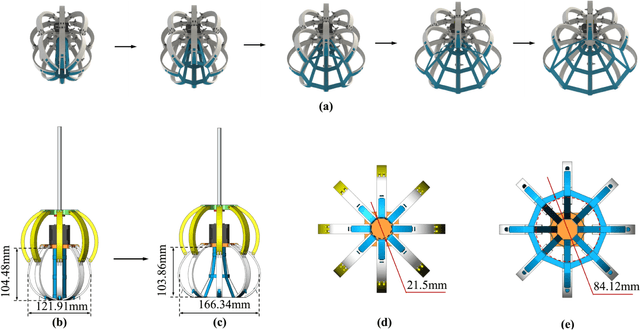
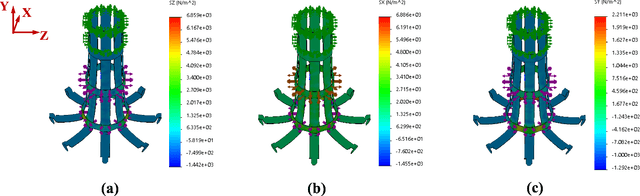
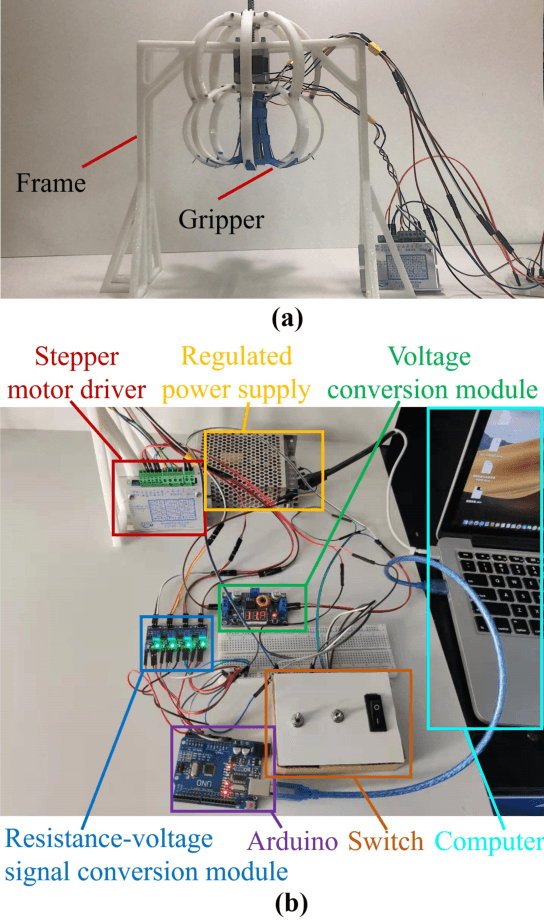
Novel robotic grippers have captured increasing interests recently because of their abilities to adapt to varieties of circumstances and their powerful functionalities. Differing from traditional gripper with mechanical components-made fingers, novel robotic grippers are typically made of novel structures and materials, using a novel manufacturing process. In this paper, a novel robotic gripper with external frame and internal thermoplastic elastomer belt-made net is proposed. The gripper grasps objects using the friction between the net and objects. It has the ability of adaptive gripping through flexible contact surface. Stress simulation has been used to explore the regularity between the normal stress on the net and the deformation of the net. Experiments are conducted on a variety of objects to measure the force needed to reliably grip and hold the object. Test results show that the gripper can successfully grip objects with varying shape, dimensions, and textures. It is promising that the gripper can be used for grasping fragile objects in the industry or out in the field, and also grasping the marine organisms without hurting them.