 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-Dimensional Dynamic Modeling and Motion Analysis for an Active-Tail-Actuated Robotic Fish with Barycentre Regulating Mechanism
Paper and Code
Jun 23, 2020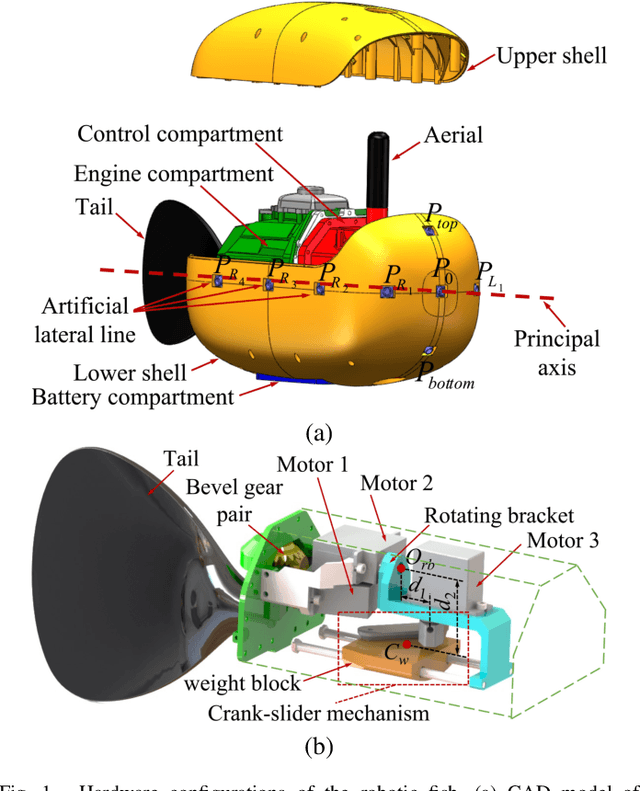
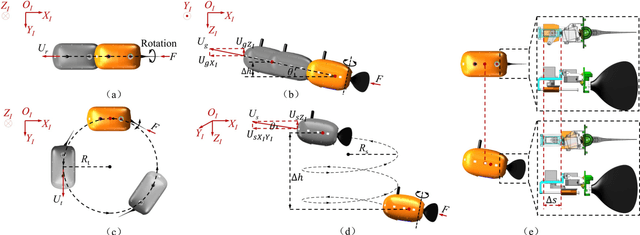
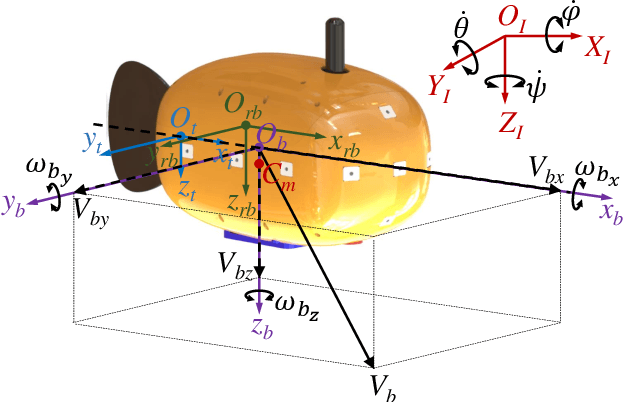
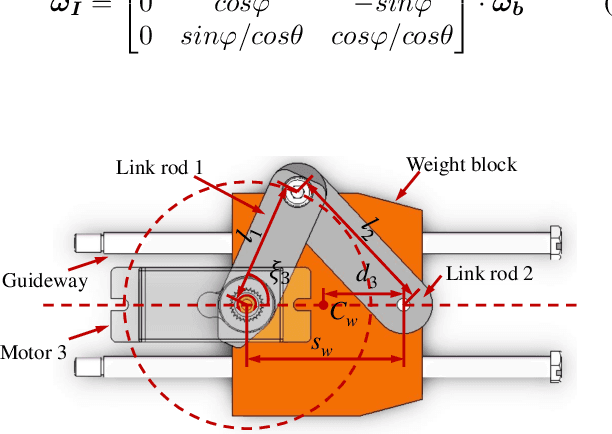
Dynamic modeling has been capturing attention for its fundamentality in precise locomotion analyses and control of underwater robots. However, the existing researches have mainly focused on investigating two-dimensional motion of underwater robots, and little attention has been paid to three-dimensional dynamic modeling, which is just what we focus on. In this article, a three-dimensional dynamic model of an active-tail-actuated robotic fish with a barycentre regulating mechanism is built by combining Newton's second law for linear motion and Euler's equation for angular motion. The model parameters are determined by three-dimensional computer-aided design (CAD) software SolidWorks, HyperFlow-based computational fluid dynamics (CFD) simulation, and grey-box model estimation method. Both kinematic experiments with a prototype and numerical simulations are applied to validate the accuracy of the dynamic model mutually. Based on the dynamic model, multiple three-dimensional motions, including rectilinear motion, turning motion, gliding motion, and spiral motion, are analyzed. The experimental and simulation results demonstrate the effectiveness of the proposed model in evaluating the trajectory, attitude, and motion parameters, including the velocity, turning radius, angular velocity, etc., of the robotic fish.