 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFish lateral line inspired perception and flow-aided control: A review
Jun 22, 2020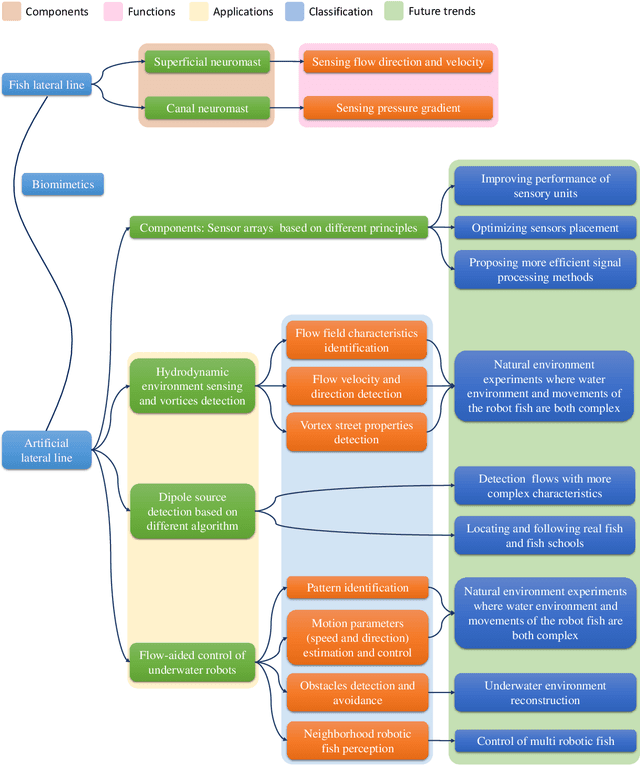
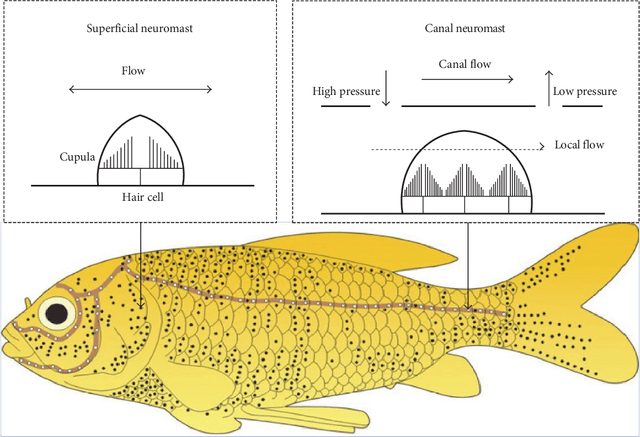
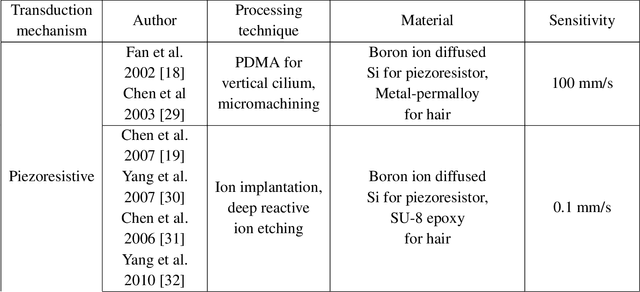
Any phenomenon in nature is potential to be an inspiration for us to propose new ideas. Lateral line is a typical example which has attracted more interest in recent years. With the aid of lateral line, fish is capable of acquiring fluid information around, which is of great significance for them to survive, communicate and hunt underwater. In this paper, we briefly introduce the morphology and mechanism of the lateral line first. Then we focus on the development of artificial lateral line which typically consists of an array of sensors and can be installed on underwater robots. A series of sensors inspired by the lateral line with different sensing principles have been summarized. And then the applications of artificial lateral line system in hydrodynamic environment sensing and vortices detection, dipole oscillation source detection, and autonomous control of underwater robots have been surveyed. In addition, the existing problems and future foci in the field have been further discussed in detail. The current works and future foci have demonstrated that artificial lateral line has great potentials of research and contributes to the applications of underwater robots.