 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Critical Heat Flux in Rod Bundles Using Tube-Based Hybrid Machine Learning Models in CTF
Feb 03, 2026The prediction of critical heat flux (CHF) using machine learning (ML) approaches has become a highly active research activity in recent years, the goal of which is to build models more accurate than current conventional approaches such as empirical correlations or lookup tables (LUTs). Previous work developed and deployed tube-based pure and hybrid ML models in the CTF subchannel code, however, full-scale reactor core simulations require the use of rod bundle geometries. Unlike isolated subchannels, rod bundles experience complex thermal hydraulic phenomena such as channel crossflow, spacer grid losses, and effects from unheated conductors. This study investigates the generalization of ML-based CHF prediction models in rod bundles after being trained on tube-based CHF data. A purely data-driven DNN and two hybrid bias-correction models were implemented in the CTF subchannel code and used to predict CHF location and magnitude in the Combustion Engineering 5-by-5 bundle CHF test series. The W-3 correlation, Bowring correlation, and Groeneveld LUT were used as baseline comparators. On average, all three ML-based approaches produced magnitude and location predictions more accurate than the baseline models, with the hybrid LUT model exhibiting the most favorable performance metrics.
A Three-Stage Bayesian Transfer Learning Framework to Improve Predictions in Data-Scarce Domains
Oct 30, 2025The use of ML in engineering has grown steadily to support a wide array of applications. Among these methods, deep neural networks have been widely adopted due to their performance and accessibility, but they require large, high-quality datasets. Experimental data are often sparse, noisy, or insufficient to build resilient data-driven models. Transfer learning, which leverages relevant data-abundant source domains to assist learning in data-scarce target domains, has shown efficacy. Parameter transfer, where pretrained weights are reused, is common but degrades under large domain shifts. Domain-adversarial neural networks (DANNs) help address this issue by learning domain-invariant representations, thereby improving transfer under greater domain shifts in a semi-supervised setting. However, DANNs can be unstable during training and lack a native means for uncertainty quantification. This study introduces a fully-supervised three-stage framework, the staged Bayesian domain-adversarial neural network (staged B-DANN), that combines parameter transfer and shared latent space adaptation. In Stage 1, a deterministic feature extractor is trained on the source domain. This feature extractor is then adversarially refined using a DANN in Stage 2. In Stage 3, a Bayesian neural network is built on the adapted feature extractor for fine-tuning on the target domain to handle conditional shifts and yield calibrated uncertainty estimates. This staged B-DANN approach was first validated on a synthetic benchmark, where it was shown to significantly outperform standard transfer techniques. It was then applied to the task of predicting critical heat flux in rectangular channels, leveraging data from tube experiments as the source domain. The results of this study show that the staged B-DANN method can improve predictive accuracy and generalization, potentially assisting other domains in nuclear engineering.
K2MUSE: A human lower limb multimodal dataset under diverse conditions for facilitating rehabilitation robotics
Apr 20, 2025The natural interaction and control performance of lower limb rehabilitation robots are closely linked to biomechanical information from various human locomotion activities. Multidimensional human motion data significantly deepen the understanding of the complex mechanisms governing neuromuscular alterations, thereby facilitating the development and application of rehabilitation robots in multifaceted real-world environments. However, currently available lower limb datasets are inadequate for supplying the essential multimodal data and large-scale gait samples necessary for effective data-driven approaches, and they neglect the significant effects of acquisition interference in real applications.To fill this gap, we present the K2MUSE dataset, which includes a comprehensive collection of multimodal data, comprising kinematic, kinetic, amplitude-mode ultrasound (AUS), and surface electromyography (sEMG) measurements. The proposed dataset includes lower limb multimodal data from 30 able-bodied participants walking under different inclines (0$^\circ$, $\pm$5$^\circ$, and $\pm$10$^\circ$), various speeds (0.5 m/s, 1.0 m/s, and 1.5 m/s), and different nonideal acquisition conditions (muscle fatigue, electrode shifts, and inter-day differences). The kinematic and ground reaction force data were collected via a Vicon motion capture system and an instrumented treadmill with embedded force plates, whereas the sEMG and AUS data were synchronously recorded for thirteen muscles on the bilateral lower limbs. This dataset offers a new resource for designing control frameworks for rehabilitation robots and conducting biomechanical analyses of lower limb locomotion. The dataset is available at https://k2muse.github.io/.
Physics-Based Hybrid Machine Learning for Critical Heat Flux Prediction with Uncertainty Quantification
Feb 26, 2025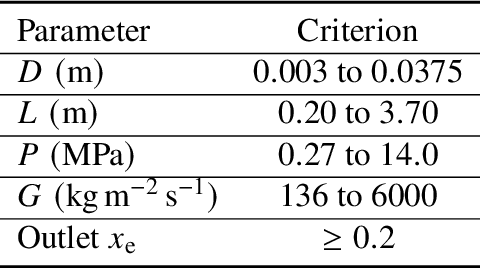
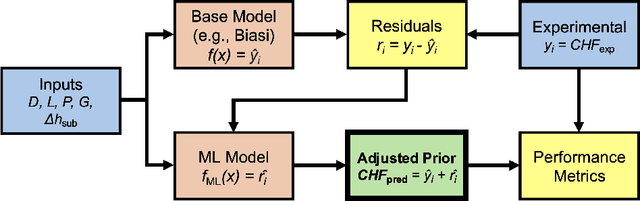
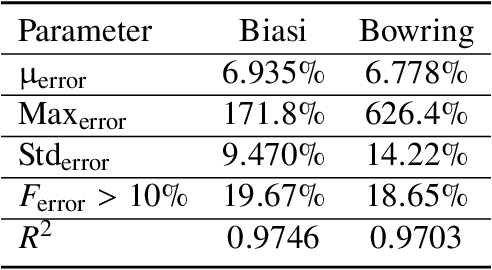
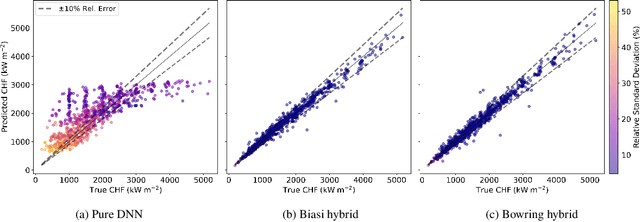
Critical heat flux is a key quantity in boiling system modeling due to its impact on heat transfer and component temperature and performance. This study investigates the development and validation of an uncertainty-aware hybrid modeling approach that combines machine learning with physics-based models in the prediction of critical heat flux in nuclear reactors for cases of dryout. Two empirical correlations, Biasi and Bowring, were employed with three machine learning uncertainty quantification techniques: deep neural network ensembles, Bayesian neural networks, and deep Gaussian processes. A pure machine learning model without a base model served as a baseline for comparison. This study examines the performance and uncertainty of the models under both plentiful and limited training data scenarios using parity plots, uncertainty distributions, and calibration curves. The results indicate that the Biasi hybrid deep neural network ensemble achieved the most favorable performance (with a mean absolute relative error of 1.846% and stable uncertainty estimates), particularly in the plentiful data scenario. The Bayesian neural network models showed slightly higher error and uncertainty but superior calibration. By contrast, deep Gaussian process models underperformed by most metrics. All hybrid models outperformed pure machine learning configurations, demonstrating resistance against data scarcity.
Native Fortran Implementation of TensorFlow-Trained Deep and Bayesian Neural Networks
Feb 07, 2025Over the past decade, the investigation of machine learning (ML) within the field of nuclear engineering has grown significantly. With many approaches reaching maturity, the next phase of investigation will determine the feasibility and usefulness of ML model implementation in a production setting. Several of the codes used for reactor design and assessment are primarily written in the Fortran language, which is not immediately compatible with TensorFlow-trained ML models. This study presents a framework for implementing deep neural networks (DNNs) and Bayesian neural networks (BNNs) in Fortran, allowing for native execution without TensorFlow's C API, Python runtime, or ONNX conversion. Designed for ease of use and computational efficiency, the framework can be implemented in any Fortran code, supporting iterative solvers and UQ via ensembles or BNNs. Verification was performed using a two-input, one-output test case composed of a noisy sinusoid to compare Fortran-based predictions to those from TensorFlow. The DNN predictions showed negligible differences and achieved a 19.6x speedup, whereas the BNN predictions exhibited minor disagreement, plausibly due to differences in random number generation. An 8.0x speedup was noted for BNN inference. The approach was then further verified on a nuclear-relevant problem predicting critical heat flux (CHF), which demonstrated similar behavior along with significant computational gains. Discussion regarding the framework's successful integration into the CTF thermal-hydraulics code is also included, outlining its practical usefulness. Overall, this framework was shown to be effective at implementing both DNN and BNN model inference within Fortran, allowing for the continued study of ML-based methods in real-world nuclear applications.
Hybrid Deep Convolutional Neural Networks Combined with Autoencoders And Augmented Data To Predict The Look-Up Table 2006
Aug 26, 2024
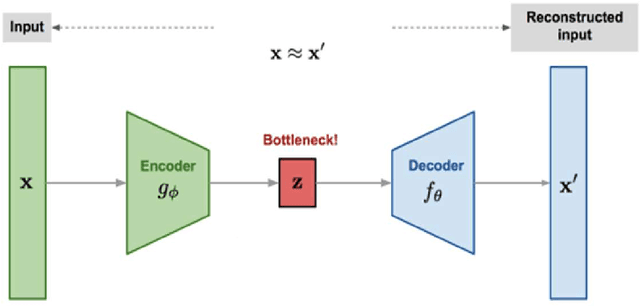
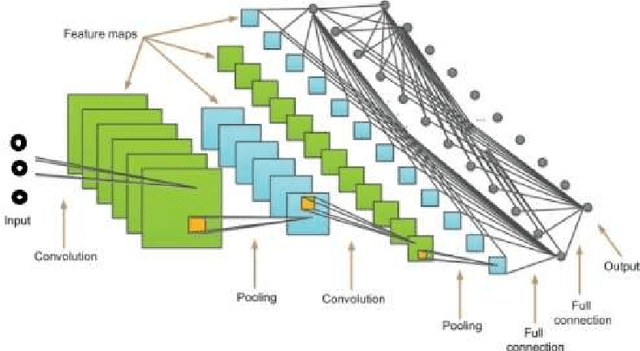
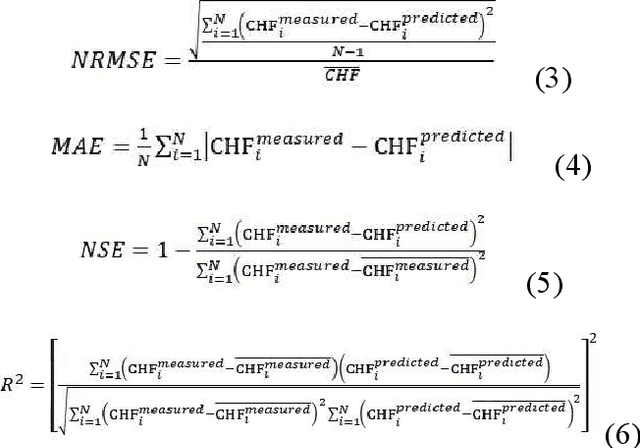
This study explores the development of a hybrid deep convolutional neural network (DCNN) model enhanced by autoencoders and data augmentation techniques to predict critical heat flux (CHF) with high accuracy. By augmenting the original input features using three different autoencoder configurations, the model's predictive capabilities were significantly improved. The hybrid models were trained and tested on a dataset of 7225 samples, with performance metrics including the coefficient of determination (R2), Nash-Sutcliffe efficiency (NSE), mean absolute error (MAE), and normalized root-mean-squared error (NRMSE) used for evaluation. Among the tested models, the DCNN_3F-A2 configuration demonstrated the highest accuracy, achieving an R2 of 0.9908 during training and 0.9826 during testing, outperforming the base model and other augmented versions. These results suggest that the proposed hybrid approach, combining deep learning with feature augmentation, offers a robust solution for CHF prediction, with the potential to generalize across a wider range of conditions.