 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Driven Discovery of Emergent Dynamics in Reaction Diffusion Systems from Sparse and Noisy Observations
Sep 11, 2025Data-driven discovery of emergent dynamics is gaining popularity, particularly in the context of reaction-diffusion systems. These systems are widely studied across various fields, including neuroscience, ecology, epidemiology, and several other subject areas that deal with emergent dynamics. A current challenge in the discovery process relates to system identification when there is no prior knowledge of the underlying physics. We attempt to address this challenge by learning Soft Artificial Life (Soft ALife) models, such as Agent-based and Cellular Automata (CA) models, from observed data for reaction-diffusion systems. In this paper, we present findings on the applicability of a conceptual framework, the Data-driven Rulesets for Soft Artificial Life (DRSALife) model, to learn Soft ALife rulesets that accurately represent emergent dynamics in a reaction-diffusion system from observed data. This model has demonstrated promising results for Elementary CA Rule 30, Game of Life, and Vicsek Flocking problems in recent work. To our knowledge, this is one of the few studies that explore machine-based Soft ALife ruleset learning and system identification for reaction-diffusion dynamics without any prior knowledge of the underlying physics. Moreover, we provide comprehensive findings from experiments investigating the potential effects of using noisy and sparse observed datasets on learning emergent dynamics. Additionally, we successfully identify the structure and parameters of the underlying partial differential equations (PDEs) representing these dynamics. Experimental results demonstrate that the learned models are able to predict the emergent dynamics with good accuracy (74%) and exhibit quite robust performance when subjected to Gaussian noise and temporal sparsity.
Hybrid Deep Convolutional Neural Networks Combined with Autoencoders And Augmented Data To Predict The Look-Up Table 2006
Aug 26, 2024
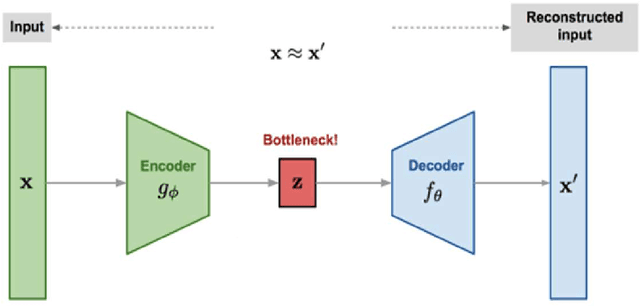
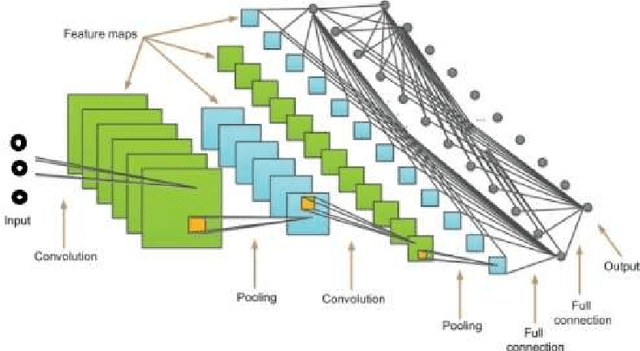
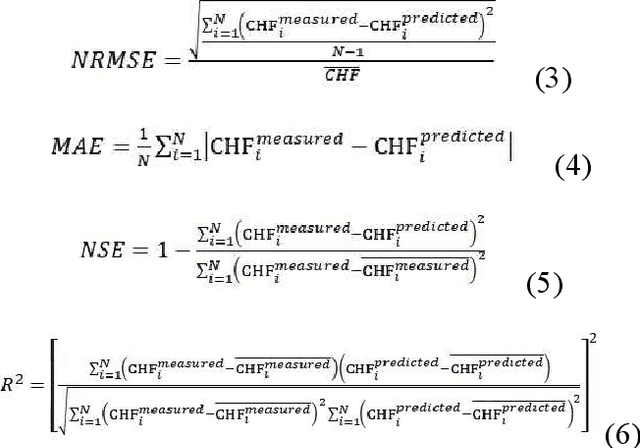
This study explores the development of a hybrid deep convolutional neural network (DCNN) model enhanced by autoencoders and data augmentation techniques to predict critical heat flux (CHF) with high accuracy. By augmenting the original input features using three different autoencoder configurations, the model's predictive capabilities were significantly improved. The hybrid models were trained and tested on a dataset of 7225 samples, with performance metrics including the coefficient of determination (R2), Nash-Sutcliffe efficiency (NSE), mean absolute error (MAE), and normalized root-mean-squared error (NRMSE) used for evaluation. Among the tested models, the DCNN_3F-A2 configuration demonstrated the highest accuracy, achieving an R2 of 0.9908 during training and 0.9826 during testing, outperforming the base model and other augmented versions. These results suggest that the proposed hybrid approach, combining deep learning with feature augmentation, offers a robust solution for CHF prediction, with the potential to generalize across a wider range of conditions.
Using Convolutional Neural Networks for the Helicity Classification of Magnetic Fields
Jun 12, 2021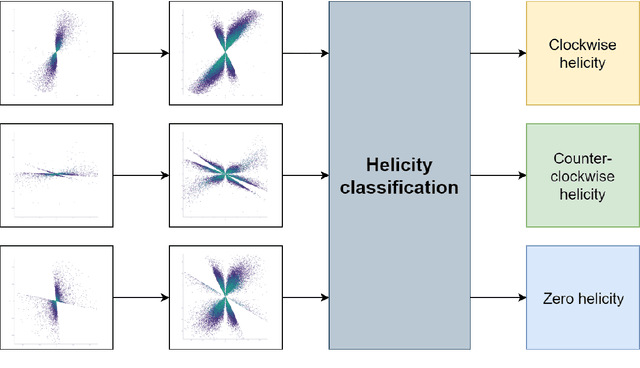
The presence of non-zero helicity in intergalactic magnetic fields is a smoking gun for their primordial origin since they have to be generated by processes that break CP invariance. As an experimental signature for the presence of helical magnetic fields, an estimator $Q$ based on the triple scalar product of the wave-vectors of photons generated in electromagnetic cascades from, e.g., TeV blazars, has been suggested previously. We propose to apply deep learning to helicity classification employing Convolutional Neural Networks and show that this method outperforms the $Q$ estimator.
Collaborative model based design of automated and robotic agricultural vehicles in the Crescendo Tool
Feb 17, 2018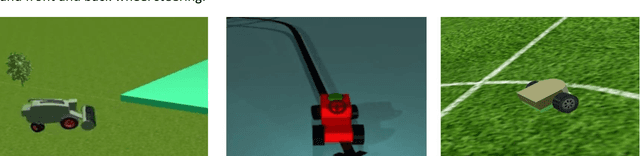
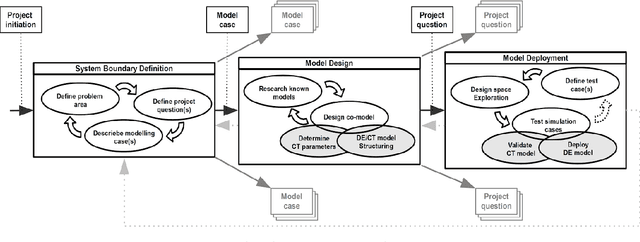
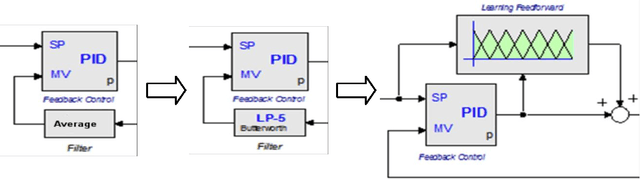
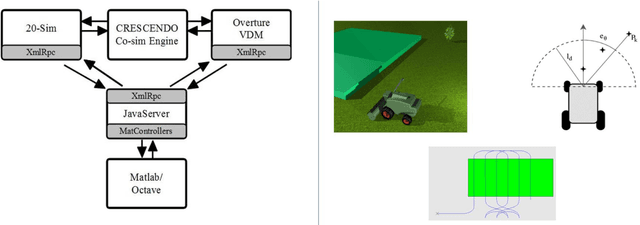
This paper describes a collaborative modelling approach to automated and robotic agricultural vehicle design. The Cresendo technology allows engineers from different disciplines to collaborate and produce system models. The combined models are called co-models and their execution co-simulation. To support future development efforts a template library of different vehicle and controllers types are provided. This paper describes a methodology to developing co-models from initial problem definition to deployment of the actual system. We illustrate the development methodology with an example development case from the agricultural domain. The case relates to an encountered speed controller problem on a differential driven vehicle, where we iterate through different candidate solutions and end up with an adaptive controller solution based on a combination of classical control and learning feedforward. The second case is an example of combining human control interface and co-simulation of agricultural robotic operation to illustrate collaborative development