 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative model based design of automated and robotic agricultural vehicles in the Crescendo Tool
Paper and Code
Feb 17, 2018
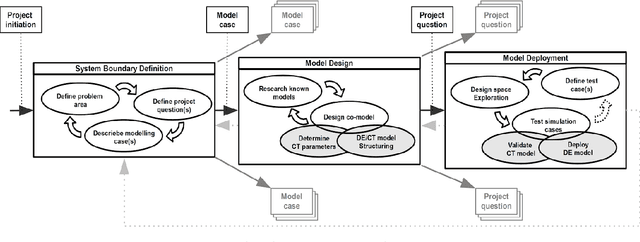
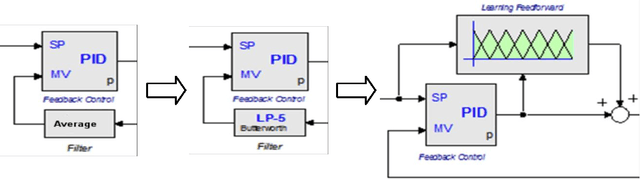
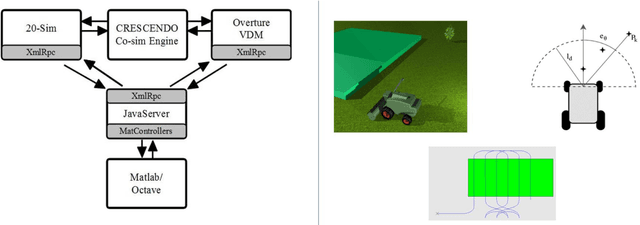
This paper describes a collaborative modelling approach to automated and robotic agricultural vehicle design. The Cresendo technology allows engineers from different disciplines to collaborate and produce system models. The combined models are called co-models and their execution co-simulation. To support future development efforts a template library of different vehicle and controllers types are provided. This paper describes a methodology to developing co-models from initial problem definition to deployment of the actual system. We illustrate the development methodology with an example development case from the agricultural domain. The case relates to an encountered speed controller problem on a differential driven vehicle, where we iterate through different candidate solutions and end up with an adaptive controller solution based on a combination of classical control and learning feedforward. The second case is an example of combining human control interface and co-simulation of agricultural robotic operation to illustrate collaborative development