 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommCP: Efficient Multi-Agent Coordination via LLM-Based Communication with Conformal Prediction
Feb 05, 2026To complete assignments provided by humans in natural language, robots must interpret commands, generate and answer relevant questions for scene understanding, and manipulate target objects. Real-world deployments often require multiple heterogeneous robots with different manipulation capabilities to handle different assignments cooperatively. Beyond the need for specialized manipulation skills, effective information gathering is important in completing these assignments. To address this component of the problem, we formalize the information-gathering process in a fully cooperative setting as an underexplored multi-agent multi-task Embodied Question Answering (MM-EQA) problem, which is a novel extension of canonical Embodied Question Answering (EQA), where effective communication is crucial for coordinating efforts without redundancy. To address this problem, we propose CommCP, a novel LLM-based decentralized communication framework designed for MM-EQA. Our framework employs conformal prediction to calibrate the generated messages, thereby minimizing receiver distractions and enhancing communication reliability. To evaluate our framework, we introduce an MM-EQA benchmark featuring diverse, photo-realistic household scenarios with embodied questions. Experimental results demonstrate that CommCP significantly enhances the task success rate and exploration efficiency over baselines. The experiment videos, code, and dataset are available on our project website: https://comm-cp.github.io.
GUIDES: Guidance Using Instructor-Distilled Embeddings for Pre-trained Robot Policy Enhancement
Nov 05, 2025Pre-trained robot policies serve as the foundation of many validated robotic systems, which encapsulate extensive embodied knowledge. However, they often lack the semantic awareness characteristic of foundation models, and replacing them entirely is impractical in many situations due to high costs and the loss of accumulated knowledge. To address this gap, we introduce GUIDES, a lightweight framework that augments pre-trained policies with semantic guidance from foundation models without requiring architectural redesign. GUIDES employs a fine-tuned vision-language model (Instructor) to generate contextual instructions, which are encoded by an auxiliary module into guidance embeddings. These embeddings are injected into the policy's latent space, allowing the legacy model to adapt to this new semantic input through brief, targeted fine-tuning. For inference-time robustness, a large language model-based Reflector monitors the Instructor's confidence and, when confidence is low, initiates a reasoning loop that analyzes execution history, retrieves relevant examples, and augments the VLM's context to refine subsequent actions. Extensive validation in the RoboCasa simulation environment across diverse policy architectures shows consistent and substantial improvements in task success rates. Real-world deployment on a UR5 robot further demonstrates that GUIDES enhances motion precision for critical sub-tasks such as grasping. Overall, GUIDES offers a practical and resource-efficient pathway to upgrade, rather than replace, validated robot policies.
Towards Generalizable Safety in Crowd Navigation via Conformal Uncertainty Handling
Aug 07, 2025Mobile robots navigating in crowds trained using reinforcement learning are known to suffer performance degradation when faced with out-of-distribution scenarios. We propose that by properly accounting for the uncertainties of pedestrians, a robot can learn safe navigation policies that are robust to distribution shifts. Our method augments agent observations with prediction uncertainty estimates generated by adaptive conformal inference, and it uses these estimates to guide the agent's behavior through constrained reinforcement learning. The system helps regulate the agent's actions and enables it to adapt to distribution shifts. In the in-distribution setting, our approach achieves a 96.93% success rate, which is over 8.80% higher than the previous state-of-the-art baselines with over 3.72 times fewer collisions and 2.43 times fewer intrusions into ground-truth human future trajectories. In three out-of-distribution scenarios, our method shows much stronger robustness when facing distribution shifts in velocity variations, policy changes, and transitions from individual to group dynamics. We deploy our method on a real robot, and experiments show that the robot makes safe and robust decisions when interacting with both sparse and dense crowds. Our code and videos are available on https://gen-safe-nav.github.io/.
HEAL: An Empirical Study on Hallucinations in Embodied Agents Driven by Large Language Models
Jun 18, 2025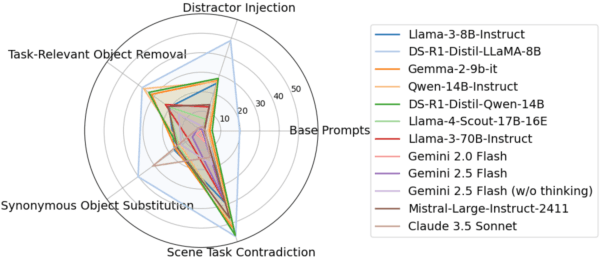
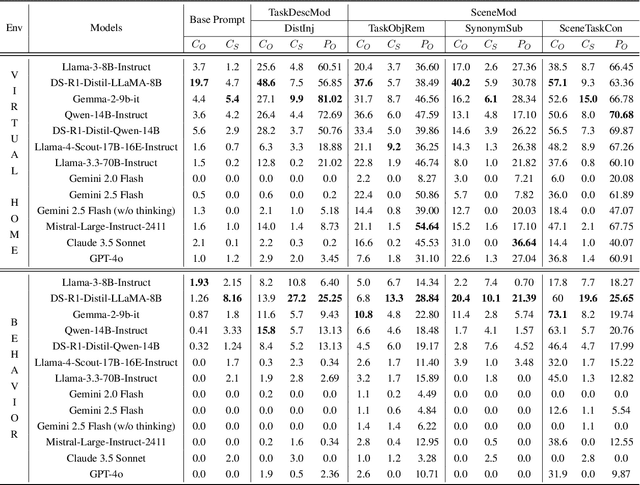
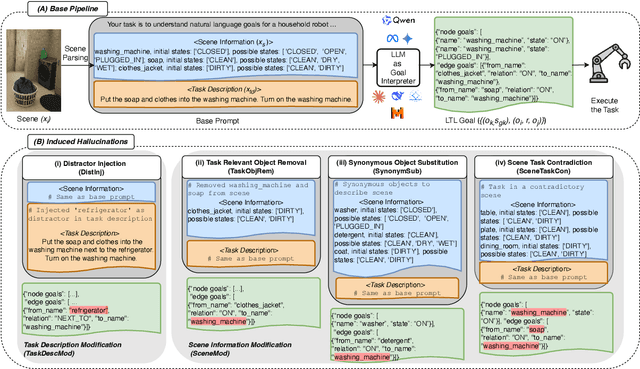
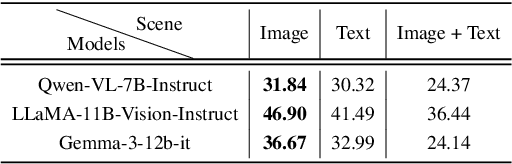
Large language models (LLMs) are increasingly being adopted as the cognitive core of embodied agents. However, inherited hallucinations, which stem from failures to ground user instructions in the observed physical environment, can lead to navigation errors, such as searching for a refrigerator that does not exist. In this paper, we present the first systematic study of hallucinations in LLM-based embodied agents performing long-horizon tasks under scene-task inconsistencies. Our goal is to understand to what extent hallucinations occur, what types of inconsistencies trigger them, and how current models respond. To achieve these goals, we construct a hallucination probing set by building on an existing benchmark, capable of inducing hallucination rates up to 40x higher than base prompts. Evaluating 12 models across two simulation environments, we find that while models exhibit reasoning, they fail to resolve scene-task inconsistencies-highlighting fundamental limitations in handling infeasible tasks. We also provide actionable insights on ideal model behavior for each scenario, offering guidance for developing more robust and reliable planning strategies.
LaMMA-P: Generalizable Multi-Agent Long-Horizon Task Allocation and Planning with LM-Driven PDDL Planner
Sep 30, 2024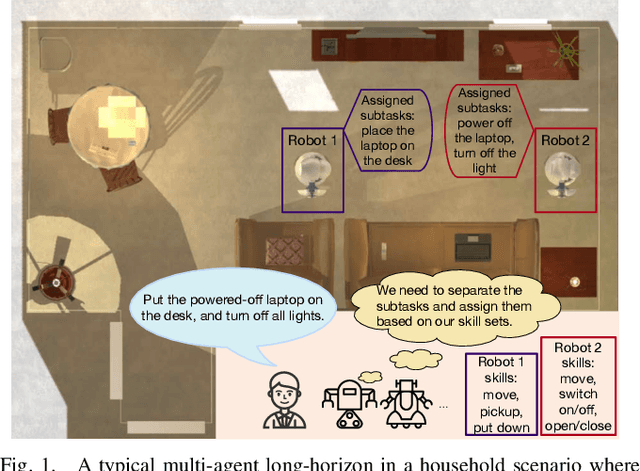

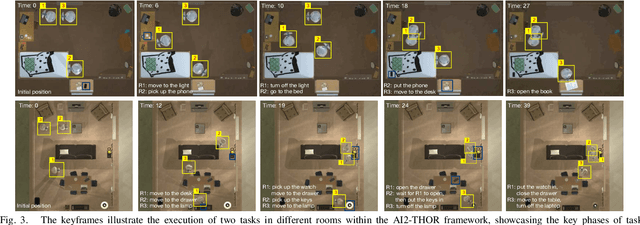

Language models (LMs) possess a strong capability to comprehend natural language, making them effective in translating human instructions into detailed plans for simple robot tasks. Nevertheless, it remains a significant challenge to handle long-horizon tasks, especially in subtask identification and allocation for cooperative heterogeneous robot teams. To address this issue, we propose a Language Model-Driven Multi-Agent PDDL Planner (LaMMA-P), a novel multi-agent task planning framework that achieves state-of-the-art performance on long-horizon tasks. LaMMA-P integrates the strengths of the LMs' reasoning capability and the traditional heuristic search planner to achieve a high success rate and efficiency while demonstrating strong generalization across tasks. Additionally, we create MAT-THOR, a comprehensive benchmark that features household tasks with two different levels of complexity based on the AI2-THOR environment. The experimental results demonstrate that LaMMA-P achieves a 105% higher success rate and 36% higher efficiency than existing LM-based multi-agent planners. The experimental videos, code, and datasets of this work as well as the detailed prompts used in each module are available at https://lamma-p.github.io.
SoNIC: Safe Social Navigation with Adaptive Conformal Inference and Constrained Reinforcement Learning
Jul 24, 2024Reinforcement Learning (RL) has enabled social robots to generate trajectories without human-designed rules or interventions, which makes it more effective than hard-coded systems for generalizing to complex real-world scenarios. However, social navigation is a safety-critical task that requires robots to avoid collisions with pedestrians while previous RL-based solutions fall short in safety performance in complex environments. To enhance the safety of RL policies, to the best of our knowledge, we propose the first algorithm, SoNIC, that integrates adaptive conformal inference (ACI) with constrained reinforcement learning (CRL) to learn safe policies for social navigation. More specifically, our method augments RL observations with ACI-generated nonconformity scores and provides explicit guidance for agents to leverage the uncertainty metrics to avoid safety-critical areas by incorporating safety constraints with spatial relaxation. Our method outperforms state-of-the-art baselines in terms of both safety and adherence to social norms by a large margin and demonstrates much stronger robustness to out-of-distribution scenarios. Our code and video demos are available on our project website: https://sonic-social-nav.github.io/.