 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Neural Column Generation Approach to the Vehicle Routing Problem with Two-Dimensional Loading and Last-In-First-Out Constraints
Jun 18, 2024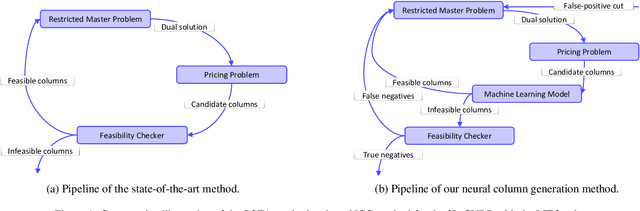



The vehicle routing problem with two-dimensional loading constraints (2L-CVRP) and the last-in-first-out (LIFO) rule presents significant practical and algorithmic challenges. While numerous heuristic approaches have been proposed to address its complexity, stemming from two NP-hard problems: the vehicle routing problem (VRP) and the two-dimensional bin packing problem (2D-BPP), less attention has been paid to developing exact algorithms. Bridging this gap, this article presents an exact algorithm that integrates advanced machine learning techniques, specifically a novel combination of attention and recurrence mechanisms. This integration accelerates the state-of-the-art exact algorithm by a median of 29.79% across various problem instances. Moreover, the proposed algorithm successfully resolves an open instance in the standard test-bed, demonstrating significant improvements brought about by the incorporation of machine learning models. Code is available at https://github.com/xyfffff/NCG-for-2L-CVRP.
Fully-fused Multi-Layer Perceptrons on Intel Data Center GPUs
Mar 26, 2024



This paper presents a SYCL implementation of Multi-Layer Perceptrons (MLPs), which targets and is optimized for the Intel Data Center GPU Max 1550. To increase the performance, our implementation minimizes the slow global memory accesses by maximizing the data reuse within the general register file and the shared local memory by fusing the operations in each layer of the MLP. We show with a simple roofline model that this results in a significant increase in the arithmetic intensity, leading to improved performance, especially for inference. We compare our approach to a similar CUDA implementation for MLPs and show that our implementation on the Intel Data Center GPU outperforms the CUDA implementation on Nvidia's H100 GPU by a factor up to 2.84 in inference and 1.75 in training. The paper also showcases the efficiency of our SYCL implementation in three significant areas: Image Compression, Neural Radiance Fields, and Physics-Informed Machine Learning. In all cases, our implementation outperforms the off-the-shelf Intel Extension for PyTorch (IPEX) implementation on the same Intel GPU by up to a factor of 30 and the CUDA PyTorch version on Nvidia's H100 GPU by up to a factor 19. The code can be found at https://github.com/intel/tiny-dpcpp-nn.
Part-aware Prototype Network for Few-shot Semantic Segmentation
Jul 13, 2020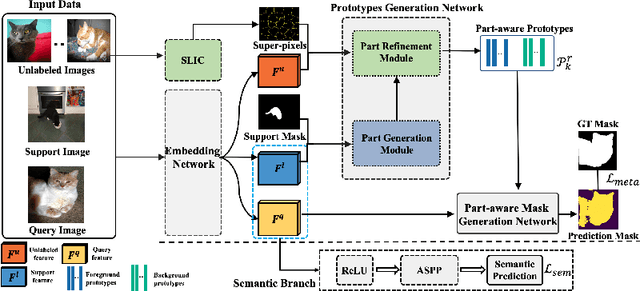
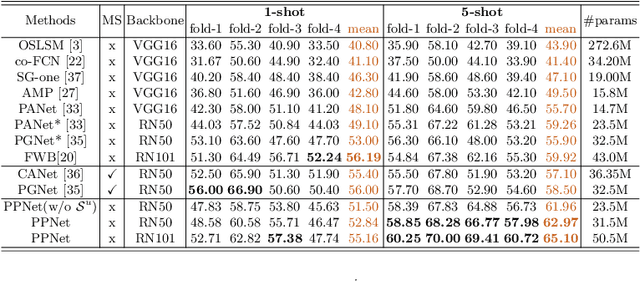
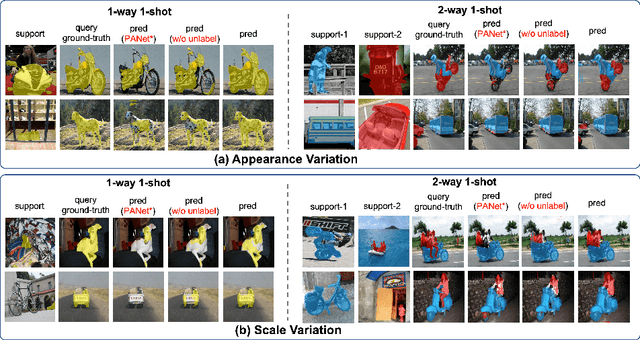

Few-shot semantic segmentation aims to learn to segment new object classes with only a few annotated examples, which has a wide range of real-world applications. Most existing methods either focus on the restrictive setting of one-way few-shot segmentation or suffer from incomplete coverage of object regions. In this paper, we propose a novel few-shot semantic segmentation framework based on the prototype representation. Our key idea is to decompose the holistic class representation into a set of part-aware prototypes, capable of capturing diverse and fine-grained object features. In addition, we propose to leverage unlabeled data to enrich our part-aware prototypes, resulting in better modeling of intra-class variations of semantic objects. We develop a novel graph neural network model to generate and enhance the proposed part-aware prototypes based on labeled and unlabeled images. Extensive experimental evaluations on two benchmarks show that our method outperforms the prior art with a sizable margin.