 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale-invariant and View-relational Representation Learning for Full Surround Monocular Depth
Dec 09, 2025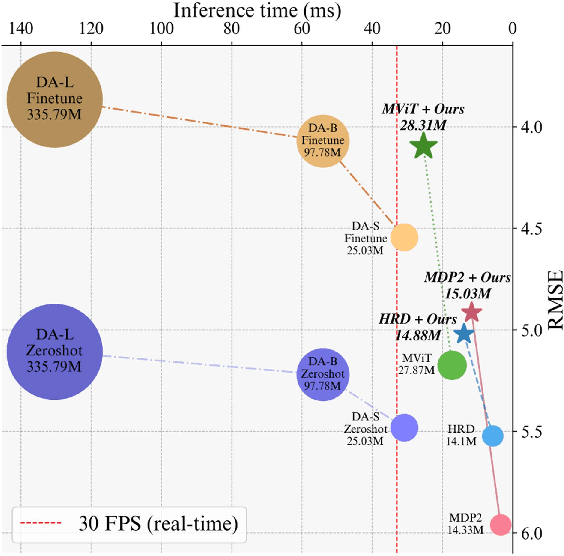
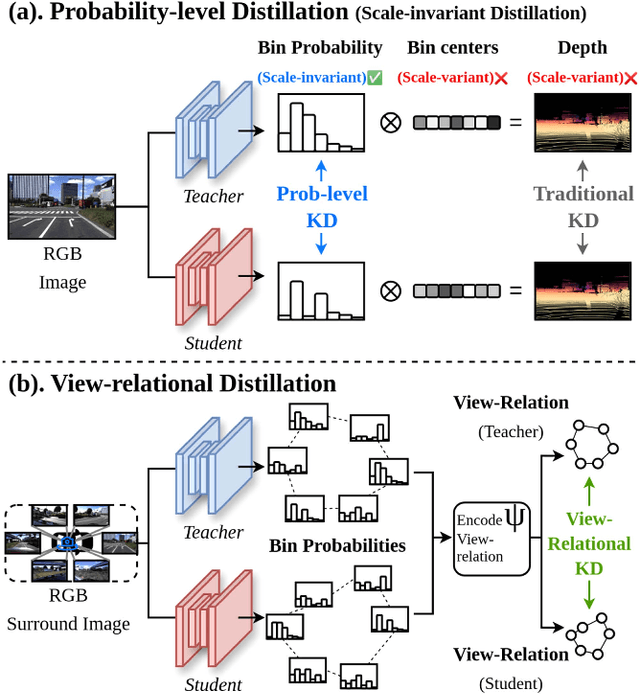
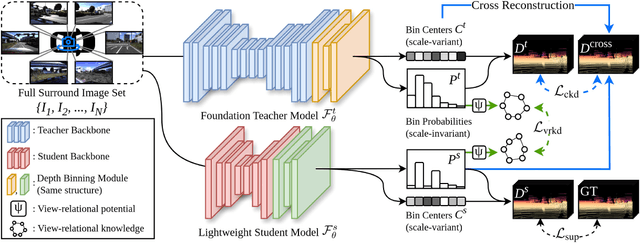
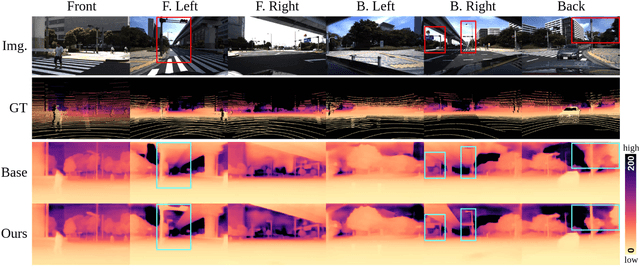
Recent foundation models demonstrate strong generalization capabilities in monocular depth estimation. However, directly applying these models to Full Surround Monocular Depth Estimation (FSMDE) presents two major challenges: (1) high computational cost, which limits real-time performance, and (2) difficulty in estimating metric-scale depth, as these models are typically trained to predict only relative depth. To address these limitations, we propose a novel knowledge distillation strategy that transfers robust depth knowledge from a foundation model to a lightweight FSMDE network. Our approach leverages a hybrid regression framework combining the knowledge distillation scheme--traditionally used in classification--with a depth binning module to enhance scale consistency. Specifically, we introduce a cross-interaction knowledge distillation scheme that distills the scale-invariant depth bin probabilities of a foundation model into the student network while guiding it to infer metric-scale depth bin centers from ground-truth depth. Furthermore, we propose view-relational knowledge distillation, which encodes structural relationships among adjacent camera views and transfers them to enhance cross-view depth consistency. Experiments on DDAD and nuScenes demonstrate the effectiveness of our method compared to conventional supervised methods and existing knowledge distillation approaches. Moreover, our method achieves a favorable trade-off between performance and efficiency, meeting real-time requirements.
Infinite-Story: A Training-Free Consistent Text-to-Image Generation
Nov 17, 2025We present Infinite-Story, a training-free framework for consistent text-to-image (T2I) generation tailored for multi-prompt storytelling scenarios. Built upon a scale-wise autoregressive model, our method addresses two key challenges in consistent T2I generation: identity inconsistency and style inconsistency. To overcome these issues, we introduce three complementary techniques: Identity Prompt Replacement, which mitigates context bias in text encoders to align identity attributes across prompts; and a unified attention guidance mechanism comprising Adaptive Style Injection and Synchronized Guidance Adaptation, which jointly enforce global style and identity appearance consistency while preserving prompt fidelity. Unlike prior diffusion-based approaches that require fine-tuning or suffer from slow inference, Infinite-Story operates entirely at test time, delivering high identity and style consistency across diverse prompts. Extensive experiments demonstrate that our method achieves state-of-the-art generation performance, while offering over 6X faster inference (1.72 seconds per image) than the existing fastest consistent T2I models, highlighting its effectiveness and practicality for real-world visual storytelling.
Prompt-Based Safety Guidance Is Ineffective for Unlearned Text-to-Image Diffusion Models
Nov 06, 2025Recent advances in text-to-image generative models have raised concerns about their potential to produce harmful content when provided with malicious input text prompts. To address this issue, two main approaches have emerged: (1) fine-tuning the model to unlearn harmful concepts and (2) training-free guidance methods that leverage negative prompts. However, we observe that combining these two orthogonal approaches often leads to marginal or even degraded defense performance. This observation indicates a critical incompatibility between two paradigms, which hinders their combined effectiveness. In this work, we address this issue by proposing a conceptually simple yet experimentally robust method: replacing the negative prompts used in training-free methods with implicit negative embeddings obtained through concept inversion. Our method requires no modification to either approach and can be easily integrated into existing pipelines. We experimentally validate its effectiveness on nudity and violence benchmarks, demonstrating consistent improvements in defense success rate while preserving the core semantics of input prompts.
Intrinsic Image Decomposition for Robust Self-supervised Monocular Depth Estimation on Reflective Surfaces
Mar 28, 2025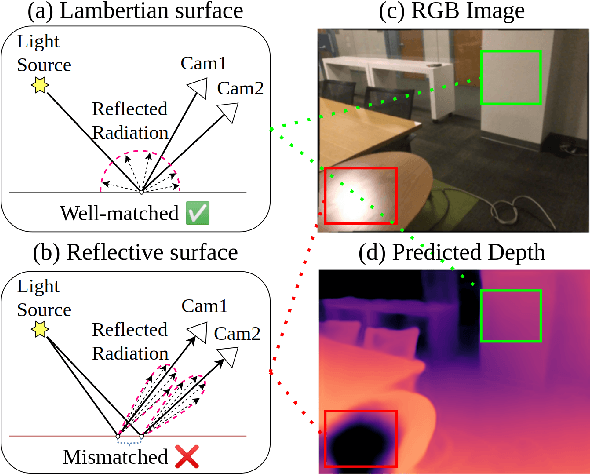
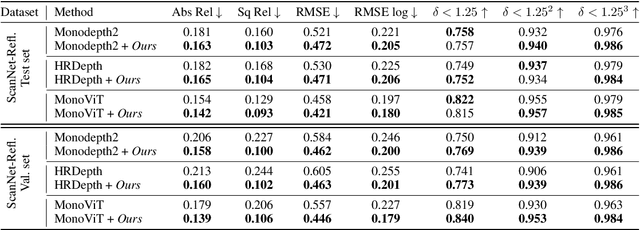
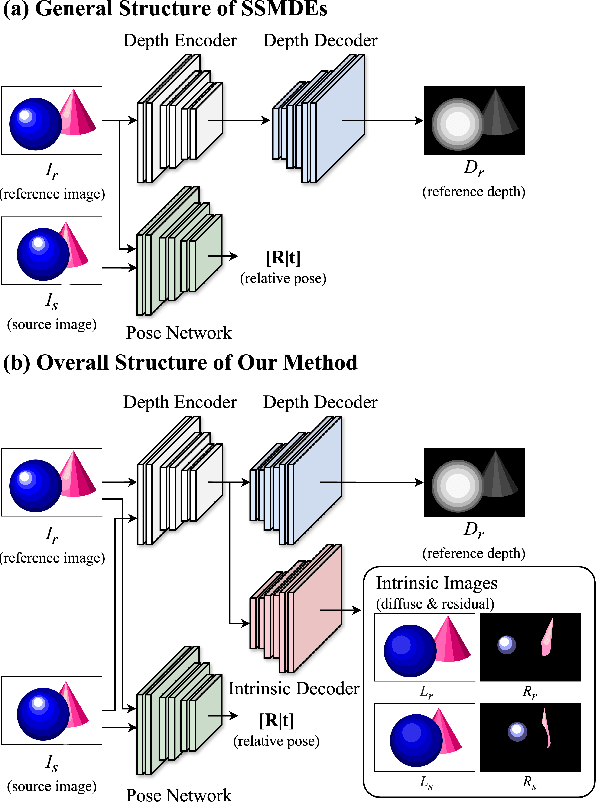
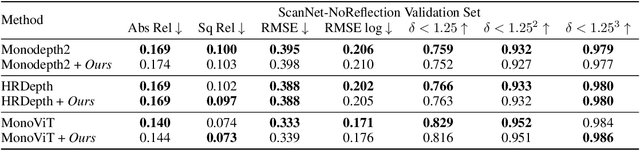
Self-supervised monocular depth estimation (SSMDE) has gained attention in the field of deep learning as it estimates depth without requiring ground truth depth maps. This approach typically uses a photometric consistency loss between a synthesized image, generated from the estimated depth, and the original image, thereby reducing the need for extensive dataset acquisition. However, the conventional photometric consistency loss relies on the Lambertian assumption, which often leads to significant errors when dealing with reflective surfaces that deviate from this model. To address this limitation, we propose a novel framework that incorporates intrinsic image decomposition into SSMDE. Our method synergistically trains for both monocular depth estimation and intrinsic image decomposition. The accurate depth estimation facilitates multi-image consistency for intrinsic image decomposition by aligning different view coordinate systems, while the decomposition process identifies reflective areas and excludes corrupted gradients from the depth training process. Furthermore, our framework introduces a pseudo-depth generation and knowledge distillation technique to further enhance the performance of the student model across both reflective and non-reflective surfaces. Comprehensive evaluations on multiple datasets show that our approach significantly outperforms existing SSMDE baselines in depth prediction, especially on reflective surfaces.
Multi-task Learning for Real-time Autonomous Driving Leveraging Task-adaptive Attention Generator
Mar 06, 2024



Real-time processing is crucial in autonomous driving systems due to the imperative of instantaneous decision-making and rapid response. In real-world scenarios, autonomous vehicles are continuously tasked with interpreting their surroundings, analyzing intricate sensor data, and making decisions within split seconds to ensure safety through numerous computer vision tasks. In this paper, we present a new real-time multi-task network adept at three vital autonomous driving tasks: monocular 3D object detection, semantic segmentation, and dense depth estimation. To counter the challenge of negative transfer, which is the prevalent issue in multi-task learning, we introduce a task-adaptive attention generator. This generator is designed to automatically discern interrelations across the three tasks and arrange the task-sharing pattern, all while leveraging the efficiency of the hard-parameter sharing approach. To the best of our knowledge, the proposed model is pioneering in its capability to concurrently handle multiple tasks, notably 3D object detection, while maintaining real-time processing speeds. Our rigorously optimized network, when tested on the Cityscapes-3D datasets, consistently outperforms various baseline models. Moreover, an in-depth ablation study substantiates the efficacy of the methodologies integrated into our framework.
Depth-discriminative Metric Learning for Monocular 3D Object Detection
Jan 02, 2024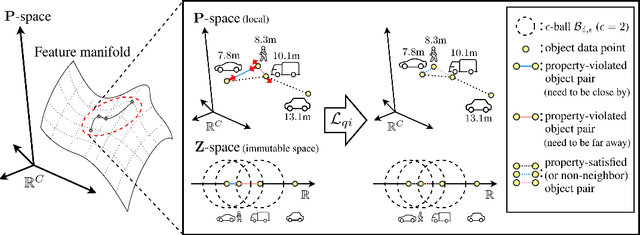
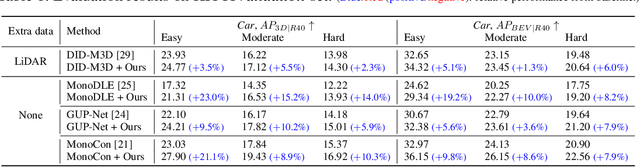
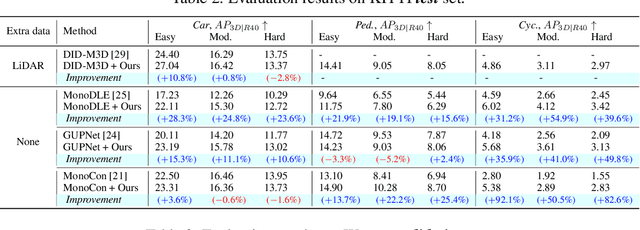
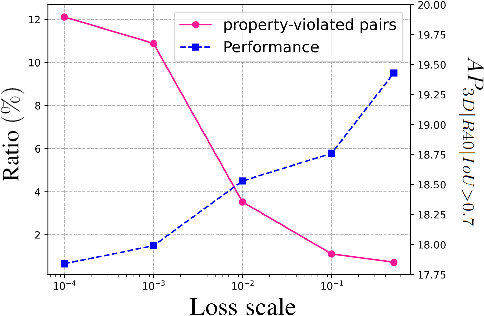
Monocular 3D object detection poses a significant challenge due to the lack of depth information in RGB images. Many existing methods strive to enhance the object depth estimation performance by allocating additional parameters for object depth estimation, utilizing extra modules or data. In contrast, we introduce a novel metric learning scheme that encourages the model to extract depth-discriminative features regardless of the visual attributes without increasing inference time and model size. Our method employs the distance-preserving function to organize the feature space manifold in relation to ground-truth object depth. The proposed (K, B, eps)-quasi-isometric loss leverages predetermined pairwise distance restriction as guidance for adjusting the distance among object descriptors without disrupting the non-linearity of the natural feature manifold. Moreover, we introduce an auxiliary head for object-wise depth estimation, which enhances depth quality while maintaining the inference time. The broad applicability of our method is demonstrated through experiments that show improvements in overall performance when integrated into various baselines. The results show that our method consistently improves the performance of various baselines by 23.51% and 5.78% on average across KITTI and Waymo, respectively.
Dynamic Neural Network for Multi-Task Learning Searching across Diverse Network Topologies
Mar 13, 2023



In this paper, we present a new MTL framework that searches for structures optimized for multiple tasks with diverse graph topologies and shares features among tasks. We design a restricted DAG-based central network with read-in/read-out layers to build topologically diverse task-adaptive structures while limiting search space and time. We search for a single optimized network that serves as multiple task adaptive sub-networks using our three-stage training process. To make the network compact and discretized, we propose a flow-based reduction algorithm and a squeeze loss used in the training process. We evaluate our optimized network on various public MTL datasets and show ours achieves state-of-the-art performance. An extensive ablation study experimentally validates the effectiveness of the sub-module and schemes in our framework.
ADAS: A Direct Adaptation Strategy for Multi-Target Domain Adaptive Semantic Segmentation
Mar 14, 2022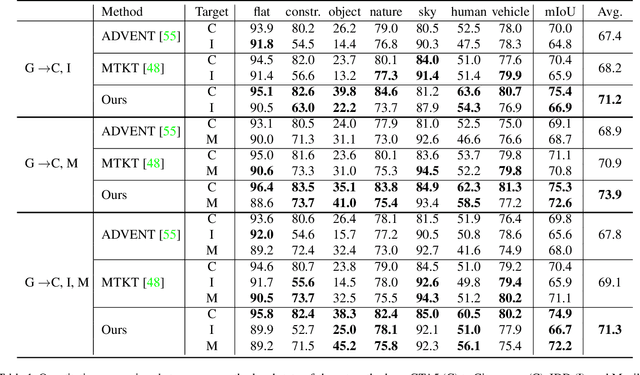


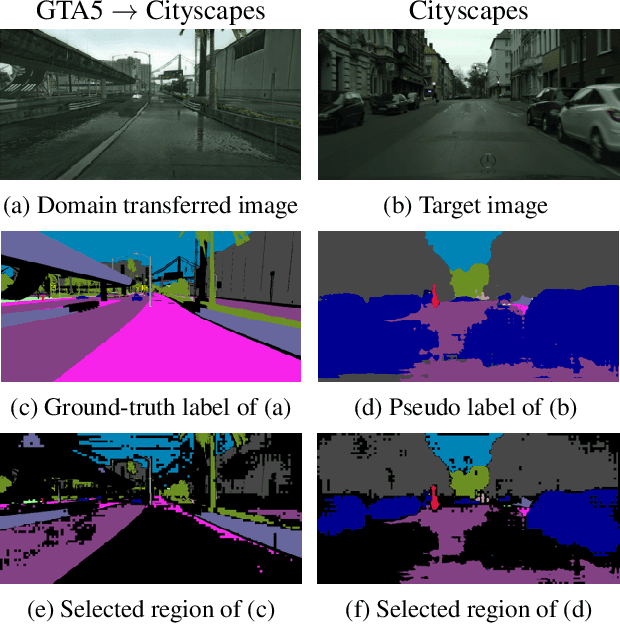
In this paper, we present a direct adaptation strategy (ADAS), which aims to directly adapt a single model to multiple target domains in a semantic segmentation task without pretrained domain-specific models. To do so, we design a multi-target domain transfer network (MTDT-Net) that aligns visual attributes across domains by transferring the domain distinctive features through a new target adaptive denormalization (TAD) module. Moreover, we propose a bi-directional adaptive region selection (BARS) that reduces the attribute ambiguity among the class labels by adaptively selecting the regions with consistent feature statistics. We show that our single MTDT-Net can synthesize visually pleasing domain transferred images with complex driving datasets, and BARS effectively filters out the unnecessary region of training images for each target domain. With the collaboration of MTDT-Net and BARS, our ADAS achieves state-of-the-art performance for multi-target domain adaptation (MTDA). To the best of our knowledge, our method is the first MTDA method that directly adapts to multiple domains in semantic segmentation.