 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale-invariant and View-relational Representation Learning for Full Surround Monocular Depth
Dec 09, 2025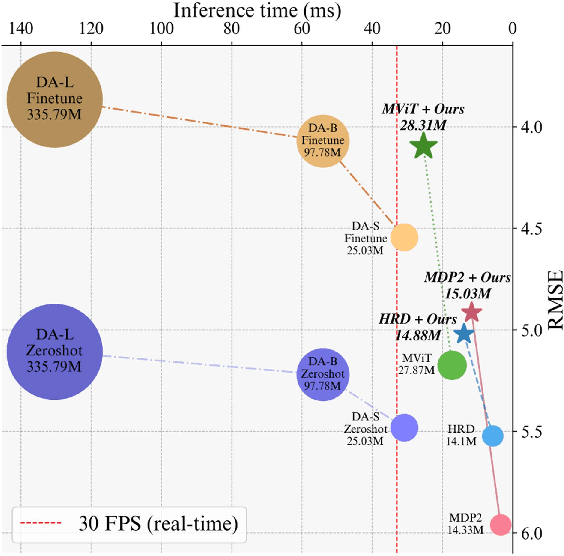
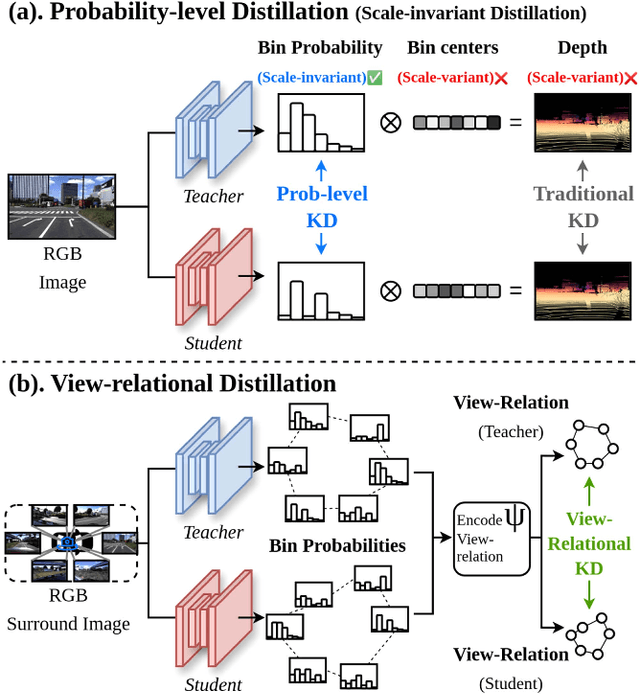
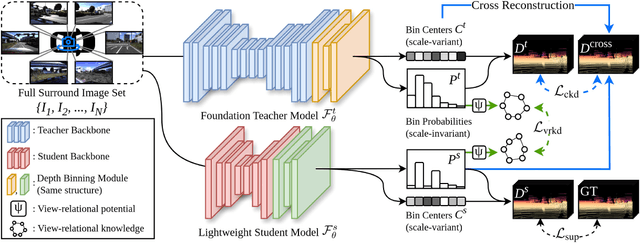
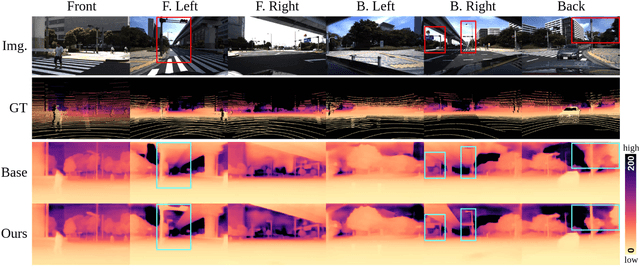
Recent foundation models demonstrate strong generalization capabilities in monocular depth estimation. However, directly applying these models to Full Surround Monocular Depth Estimation (FSMDE) presents two major challenges: (1) high computational cost, which limits real-time performance, and (2) difficulty in estimating metric-scale depth, as these models are typically trained to predict only relative depth. To address these limitations, we propose a novel knowledge distillation strategy that transfers robust depth knowledge from a foundation model to a lightweight FSMDE network. Our approach leverages a hybrid regression framework combining the knowledge distillation scheme--traditionally used in classification--with a depth binning module to enhance scale consistency. Specifically, we introduce a cross-interaction knowledge distillation scheme that distills the scale-invariant depth bin probabilities of a foundation model into the student network while guiding it to infer metric-scale depth bin centers from ground-truth depth. Furthermore, we propose view-relational knowledge distillation, which encodes structural relationships among adjacent camera views and transfers them to enhance cross-view depth consistency. Experiments on DDAD and nuScenes demonstrate the effectiveness of our method compared to conventional supervised methods and existing knowledge distillation approaches. Moreover, our method achieves a favorable trade-off between performance and efficiency, meeting real-time requirements.
Infinite-Story: A Training-Free Consistent Text-to-Image Generation
Nov 17, 2025We present Infinite-Story, a training-free framework for consistent text-to-image (T2I) generation tailored for multi-prompt storytelling scenarios. Built upon a scale-wise autoregressive model, our method addresses two key challenges in consistent T2I generation: identity inconsistency and style inconsistency. To overcome these issues, we introduce three complementary techniques: Identity Prompt Replacement, which mitigates context bias in text encoders to align identity attributes across prompts; and a unified attention guidance mechanism comprising Adaptive Style Injection and Synchronized Guidance Adaptation, which jointly enforce global style and identity appearance consistency while preserving prompt fidelity. Unlike prior diffusion-based approaches that require fine-tuning or suffer from slow inference, Infinite-Story operates entirely at test time, delivering high identity and style consistency across diverse prompts. Extensive experiments demonstrate that our method achieves state-of-the-art generation performance, while offering over 6X faster inference (1.72 seconds per image) than the existing fastest consistent T2I models, highlighting its effectiveness and practicality for real-world visual storytelling.
Intrinsic Image Decomposition for Robust Self-supervised Monocular Depth Estimation on Reflective Surfaces
Mar 28, 2025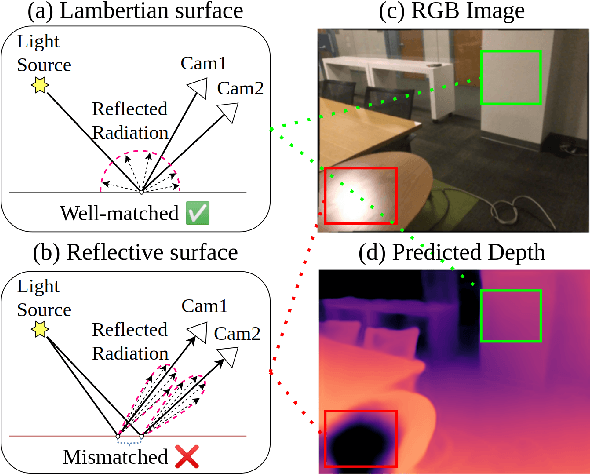
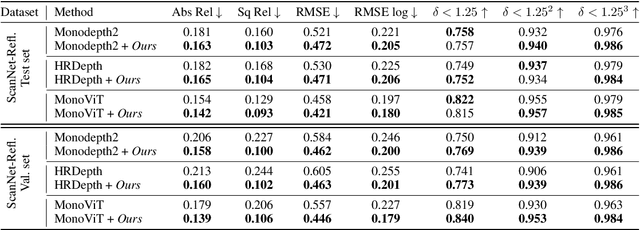
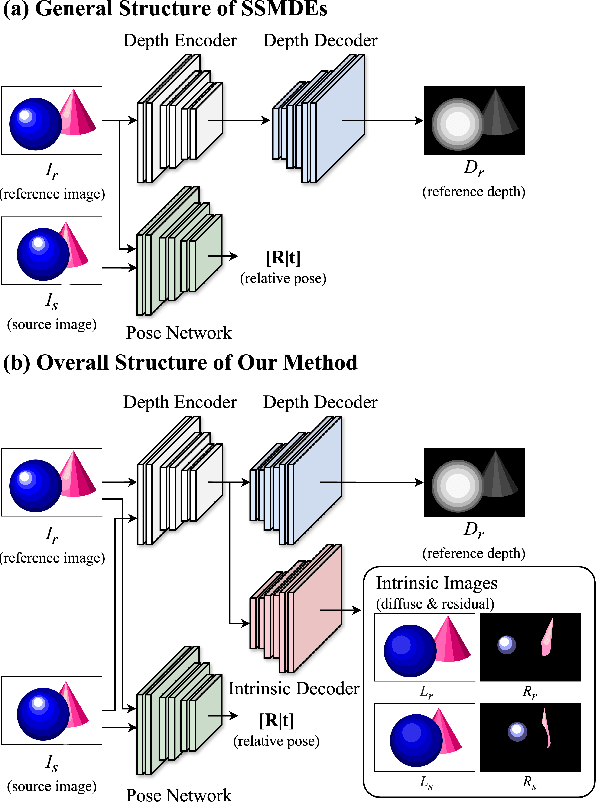
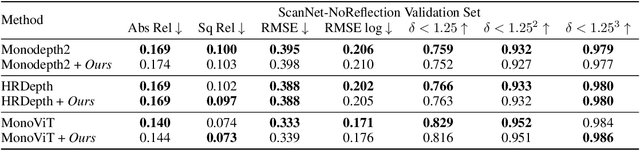
Self-supervised monocular depth estimation (SSMDE) has gained attention in the field of deep learning as it estimates depth without requiring ground truth depth maps. This approach typically uses a photometric consistency loss between a synthesized image, generated from the estimated depth, and the original image, thereby reducing the need for extensive dataset acquisition. However, the conventional photometric consistency loss relies on the Lambertian assumption, which often leads to significant errors when dealing with reflective surfaces that deviate from this model. To address this limitation, we propose a novel framework that incorporates intrinsic image decomposition into SSMDE. Our method synergistically trains for both monocular depth estimation and intrinsic image decomposition. The accurate depth estimation facilitates multi-image consistency for intrinsic image decomposition by aligning different view coordinate systems, while the decomposition process identifies reflective areas and excludes corrupted gradients from the depth training process. Furthermore, our framework introduces a pseudo-depth generation and knowledge distillation technique to further enhance the performance of the student model across both reflective and non-reflective surfaces. Comprehensive evaluations on multiple datasets show that our approach significantly outperforms existing SSMDE baselines in depth prediction, especially on reflective surfaces.
A Study on the Generality of Neural Network Structures for Monocular Depth Estimation
Jan 10, 2023Monocular depth estimation has been widely studied, and significant improvements in performance have been recently reported. However, most previous works are evaluated on a few benchmark datasets, such as KITTI datasets, and none of the works provide an in-depth analysis of the generalization performance of monocular depth estimation. In this paper, we deeply investigate the various backbone networks (e.g.CNN and Transformer models) toward the generalization of monocular depth estimation. First, we evaluate state-of-the-art models on both in-distribution and out-of-distribution datasets, which have never been seen during network training. Then, we investigate the internal properties of the representations from the intermediate layers of CNN-/Transformer-based models using synthetic texture-shifted datasets. Through extensive experiments, we observe that the Transformers exhibit a strong shape-bias rather than CNNs, which have a strong texture-bias. We also discover that texture-biased models exhibit worse generalization performance for monocular depth estimation than shape-biased models. We demonstrate that similar aspects are observed in real-world driving datasets captured under diverse environments. Lastly, we conduct a dense ablation study with various backbone networks which are utilized in modern strategies. The experiments demonstrate that the intrinsic locality of the CNNs and the self-attention of the Transformers induce texture-bias and shape-bias, respectively.