 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAESI: Leaf Area Estimation with Synthetic Imagery
Mar 31, 2024We introduce LAESI, a Synthetic Leaf Dataset of 100,000 synthetic leaf images on millimeter paper, each with semantic masks and surface area labels. This dataset provides a resource for leaf morphology analysis primarily aimed at beech and oak leaves. We evaluate the applicability of the dataset by training machine learning models for leaf surface area prediction and semantic segmentation, using real images for validation. Our validation shows that these models can be trained to predict leaf surface area with a relative error not greater than an average human annotator. LAESI also provides an efficient framework based on 3D procedural models and generative AI for the large-scale, controllable generation of data with potential further applications in agriculture and biology. We evaluate the inclusion of generative AI in our procedural data generation pipeline and show how data filtering based on annotation consistency results in datasets which allow training the highest performing vision models.
Generating Diverse Agricultural Data for Vision-Based Farming Applications
Mar 27, 2024



We present a specialized procedural model for generating synthetic agricultural scenes, focusing on soybean crops, along with various weeds. This model is capable of simulating distinct growth stages of these plants, diverse soil conditions, and randomized field arrangements under varying lighting conditions. The integration of real-world textures and environmental factors into the procedural generation process enhances the photorealism and applicability of the synthetic data. Our dataset includes 12,000 images with semantic labels, offering a comprehensive resource for computer vision tasks in precision agriculture, such as semantic segmentation for autonomous weed control. We validate our model's effectiveness by comparing the synthetic data against real agricultural images, demonstrating its potential to significantly augment training data for machine learning models in agriculture. This approach not only provides a cost-effective solution for generating high-quality, diverse data but also addresses specific needs in agricultural vision tasks that are not fully covered by general-purpose models.
Accurately Solving Physical Systems with Graph Learning
Jun 06, 2020


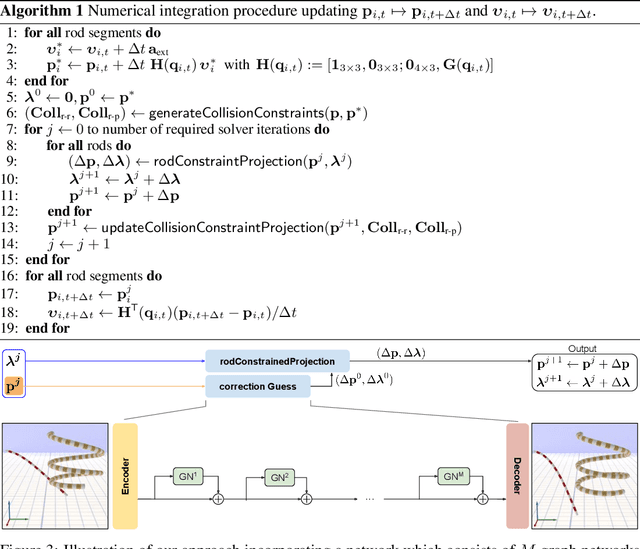
Iterative solvers are widely used to accurately simulate physical systems. These solvers require initial guesses to generate a sequence of improving approximate solutions. In this contribution, we introduce a novel method to accelerate iterative solvers for physical systems with graph networks (GNs) by predicting the initial guesses to reduce the number of iterations. Unlike existing methods that aim to learn physical systems in an end-to-end manner, our approach guarantees long-term stability and therefore leads to more accurate solutions. Furthermore, our method improves the run time performance of traditional iterative solvers. To explore our method we make use of position-based dynamics (PBD) as a common solver for physical systems and evaluate it by simulating the dynamics of elastic rods. Our approach is able to generalize across different initial conditions, discretizations, and realistic material properties. Finally, we demonstrate that our method also performs well when taking discontinuous effects into account such as collisions between individual rods. A video showing dynamic results of our graph learning assisted simulations of elastic rods can be found on the project website available at http://computationalsciences.org/publications/shao-2020-physical-systems-graph-learning.html .