 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Diverse Agricultural Data for Vision-Based Farming Applications
Mar 27, 2024



We present a specialized procedural model for generating synthetic agricultural scenes, focusing on soybean crops, along with various weeds. This model is capable of simulating distinct growth stages of these plants, diverse soil conditions, and randomized field arrangements under varying lighting conditions. The integration of real-world textures and environmental factors into the procedural generation process enhances the photorealism and applicability of the synthetic data. Our dataset includes 12,000 images with semantic labels, offering a comprehensive resource for computer vision tasks in precision agriculture, such as semantic segmentation for autonomous weed control. We validate our model's effectiveness by comparing the synthetic data against real agricultural images, demonstrating its potential to significantly augment training data for machine learning models in agriculture. This approach not only provides a cost-effective solution for generating high-quality, diverse data but also addresses specific needs in agricultural vision tasks that are not fully covered by general-purpose models.
Glushkov's construction for functional subsequential transducers
Aug 21, 2020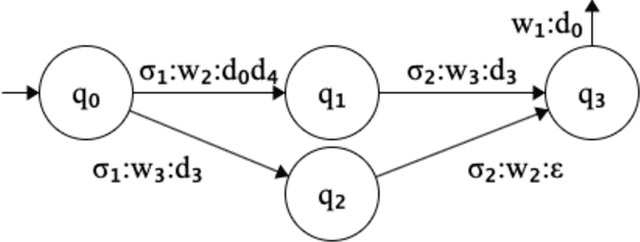
Glushkov's construction has many interesting properties and they become even more evident when applied to transducers. This article strives to show the wast range of possible extensions and optimisations for this algorithm. Special flavour of regular expressions is introduced, which can be efficiently converted to $\epsilon$-free functional subsequential weighted finite state transducers. Produced automata are very compact, as they contain only one state for each symbol (from input alphabet) of original expression and only one transition for each range of symbols, no matter how large. Such compactified ranges of transitions allow for efficient binary search lookup during automaton evaluation. All the methods and algorithms presented here were used to implement open-source compiler of regular expressions for multitape transducers.