 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Planning with PDDL+ and Beyond
Feb 19, 2024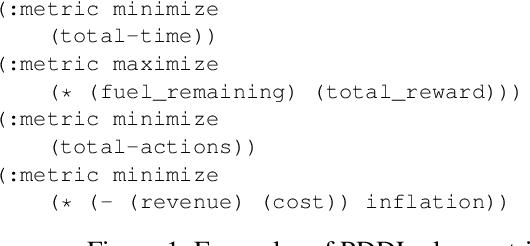

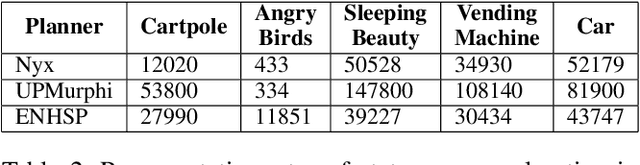
Real-world applications of AI Planning often require a highly expressive modeling language to accurately capture important intricacies of target systems. Hybrid systems are ubiquitous in the real-world, and PDDL+ is the standardized modeling language for capturing such systems as planning domains. PDDL+ enables accurate encoding of mixed discrete-continuous system dynamics, exogenous activity, and many other interesting features exhibited in realistic scenarios. However, the uptake in usage of PDDL+ has been slow and apprehensive, largely due to a general shortage of PDDL+ planning software, and rigid limitations of the few existing planners. To overcome this chasm, we present Nyx, a novel PDDL+ planner built to emphasize lightness, simplicity, and, most importantly, adaptability. The planner is designed to be effortlessly customizable to expand its capabilities well beyond the scope of PDDL+. As a result, Nyx can be tailored to virtually any potential real-world application requiring some form of AI Planning, paving the way for wider adoption of planning methods for solving real-world problems.
Novelty Accommodating Multi-Agent Planning in High Fidelity Simulated Open World
Jun 22, 2023



Autonomous agents acting in real-world environments often need to reason with unknown novelties interfering with their plan execution. Novelty is an unexpected phenomenon that can alter the core characteristics, composition, and dynamics of the environment. Novelty can occur at any time in any sufficiently complex environment without any prior notice or explanation. Previous studies show that novelty has catastrophic impact on agent performance. Intelligent agents reason with an internal model of the world to understand the intricacies of their environment and to successfully execute their plans. The introduction of novelty into the environment usually renders their internal model inaccurate and the generated plans no longer applicable. Novelty is particularly prevalent in the real world where domain-specific and even predicted novelty-specific approaches are used to mitigate the novelty's impact. In this work, we demonstrate that a domain-independent AI agent designed to detect, characterize, and accommodate novelty in smaller-scope physics-based games such as Angry Birds and Cartpole can be adapted to successfully perform and reason with novelty in realistic high-fidelity simulator of the military domain.
A Domain-Independent Agent Architecture for Adaptive Operation in Evolving Open Worlds
Jun 09, 2023



Model-based reasoning agents are ill-equipped to act in novel situations in which their model of the environment no longer sufficiently represents the world. We propose HYDRA - a framework for designing model-based agents operating in mixed discrete-continuous worlds, that can autonomously detect when the environment has evolved from its canonical setup, understand how it has evolved, and adapt the agents' models to perform effectively. HYDRA is based upon PDDL+, a rich modeling language for planning in mixed, discrete-continuous environments. It augments the planning module with visual reasoning, task selection, and action execution modules for closed-loop interaction with complex environments. HYDRA implements a novel meta-reasoning process that enables the agent to monitor its own behavior from a variety of aspects. The process employs a diverse set of computational methods to maintain expectations about the agent's own behavior in an environment. Divergences from those expectations are useful in detecting when the environment has evolved and identifying opportunities to adapt the underlying models. HYDRA builds upon ideas from diagnosis and repair and uses a heuristics-guided search over model changes such that they become competent in novel conditions. The HYDRA framework has been used to implement novelty-aware agents for three diverse domains - CartPole++ (a higher dimension variant of a classic control problem), Science Birds (an IJCAI competition problem), and PogoStick (a specific problem domain in Minecraft). We report empirical observations from these domains to demonstrate the efficacy of various components in the novelty meta-reasoning process.
Heuristic Search For Physics-Based Problems: Angry Birds in PDDL+
Mar 29, 2023



This paper studies how a domain-independent planner and combinatorial search can be employed to play Angry Birds, a well established AI challenge problem. To model the game, we use PDDL+, a planning language for mixed discrete/continuous domains that supports durative processes and exogenous events. The paper describes the model and identifies key design decisions that reduce the problem complexity. In addition, we propose several domain-specific enhancements including heuristics and a search technique similar to preferred operators. Together, they alleviate the complexity of combinatorial search. We evaluate our approach by comparing its performance with dedicated domain-specific solvers on a range of Angry Birds levels. The results show that our performance is on par with these domain-specific approaches in most levels, even without using our domain-specific search enhancements.
Learning to Operate in Open Worlds by Adapting Planning Models
Mar 24, 2023

Planning agents are ill-equipped to act in novel situations in which their domain model no longer accurately represents the world. We introduce an approach for such agents operating in open worlds that detects the presence of novelties and effectively adapts their domain models and consequent action selection. It uses observations of action execution and measures their divergence from what is expected, according to the environment model, to infer existence of a novelty. Then, it revises the model through a heuristics-guided search over model changes. We report empirical evaluations on the CartPole problem, a standard Reinforcement Learning (RL) benchmark. The results show that our approach can deal with a class of novelties very quickly and in an interpretable fashion.
System Resilience through Health Monitoring and Reconfiguration
Aug 30, 2022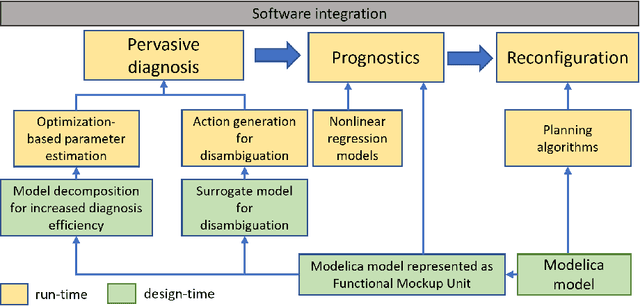


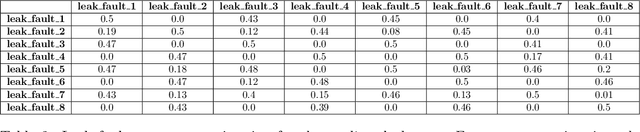
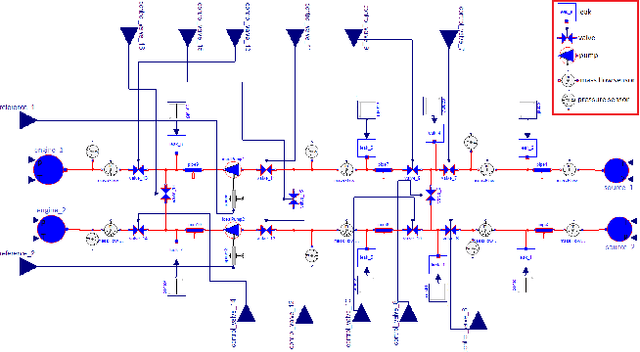
We demonstrate an end-to-end framework to improve the resilience of man-made systems to unforeseen events. The framework is based on a physics-based digital twin model and three modules tasked with real-time fault diagnosis, prognostics and reconfiguration. The fault diagnosis module uses model-based diagnosis algorithms to detect and isolate faults and generates interventions in the system to disambiguate uncertain diagnosis solutions. We scale up the fault diagnosis algorithm to the required real-time performance through the use of parallelization and surrogate models of the physics-based digital twin. The prognostics module tracks the fault progressions and trains the online degradation models to compute remaining useful life of system components. In addition, we use the degradation models to assess the impact of the fault progression on the operational requirements. The reconfiguration module uses PDDL-based planning endowed with semantic attachments to adjust the system controls so that the fault impact on the system operation is minimized. We define a resilience metric and use the example of a fuel system model to demonstrate how the metric improves with our framework.
Playing Angry Birds with a Domain-Independent PDDL+ Planner
Jul 09, 2021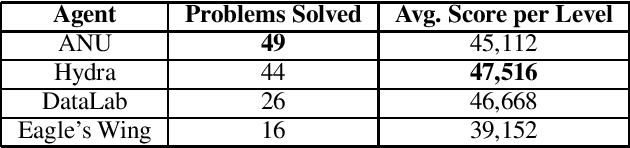
This demo paper presents the first system for playing the popular Angry Birds game using a domain-independent planner. Our system models Angry Birds levels using PDDL+, a planning language for mixed discrete/continuous domains. It uses a domain-independent PDDL+ planner to generate plans and executes them. In this demo paper, we present the system's PDDL+ model for this domain, identify key design decisions that reduce the problem complexity, and compare the performance of our system to model-specific methods for this domain. The results show that our system's performance is on par with other domain-specific systems for Angry Birds, suggesting the applicability of domain-independent planning to this benchmark AI challenge.