 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Planning with PDDL+ and Beyond
Feb 19, 2024Real-world applications of AI Planning often require a highly expressive modeling language to accurately capture important intricacies of target systems. Hybrid systems are ubiquitous in the real-world, and PDDL+ is the standardized modeling language for capturing such systems as planning domains. PDDL+ enables accurate encoding of mixed discrete-continuous system dynamics, exogenous activity, and many other interesting features exhibited in realistic scenarios. However, the uptake in usage of PDDL+ has been slow and apprehensive, largely due to a general shortage of PDDL+ planning software, and rigid limitations of the few existing planners. To overcome this chasm, we present Nyx, a novel PDDL+ planner built to emphasize lightness, simplicity, and, most importantly, adaptability. The planner is designed to be effortlessly customizable to expand its capabilities well beyond the scope of PDDL+. As a result, Nyx can be tailored to virtually any potential real-world application requiring some form of AI Planning, paving the way for wider adoption of planning methods for solving real-world problems.
System Resilience through Health Monitoring and Reconfiguration
Aug 30, 2022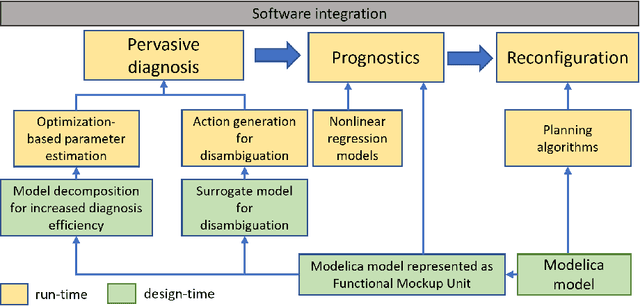


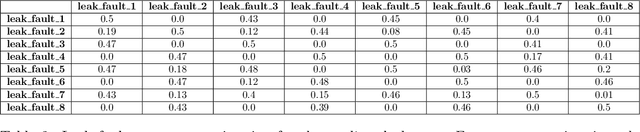
We demonstrate an end-to-end framework to improve the resilience of man-made systems to unforeseen events. The framework is based on a physics-based digital twin model and three modules tasked with real-time fault diagnosis, prognostics and reconfiguration. The fault diagnosis module uses model-based diagnosis algorithms to detect and isolate faults and generates interventions in the system to disambiguate uncertain diagnosis solutions. We scale up the fault diagnosis algorithm to the required real-time performance through the use of parallelization and surrogate models of the physics-based digital twin. The prognostics module tracks the fault progressions and trains the online degradation models to compute remaining useful life of system components. In addition, we use the degradation models to assess the impact of the fault progression on the operational requirements. The reconfiguration module uses PDDL-based planning endowed with semantic attachments to adjust the system controls so that the fault impact on the system operation is minimized. We define a resilience metric and use the example of a fuel system model to demonstrate how the metric improves with our framework.
Playing Angry Birds with a Domain-Independent PDDL+ Planner
Jul 09, 2021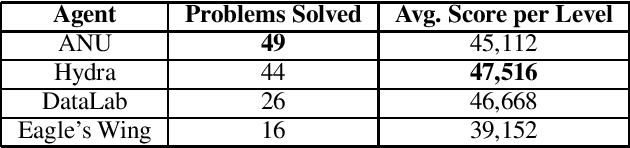
This demo paper presents the first system for playing the popular Angry Birds game using a domain-independent planner. Our system models Angry Birds levels using PDDL+, a planning language for mixed discrete/continuous domains. It uses a domain-independent PDDL+ planner to generate plans and executes them. In this demo paper, we present the system's PDDL+ model for this domain, identify key design decisions that reduce the problem complexity, and compare the performance of our system to model-specific methods for this domain. The results show that our system's performance is on par with other domain-specific systems for Angry Birds, suggesting the applicability of domain-independent planning to this benchmark AI challenge.