 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding an Aerial-Ground Robotics System for Precision Farming
Nov 08, 2019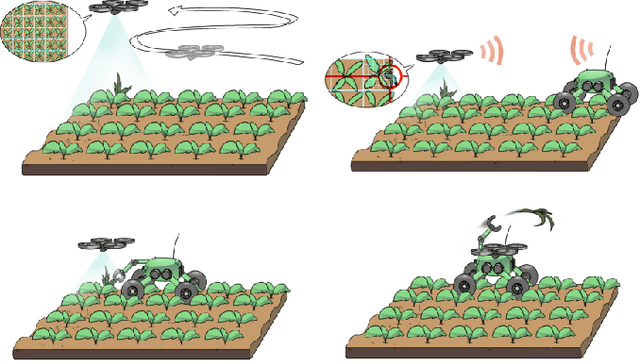
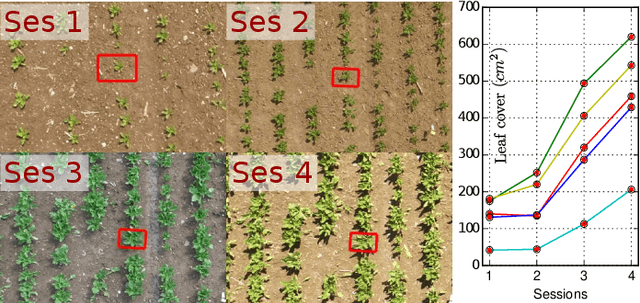
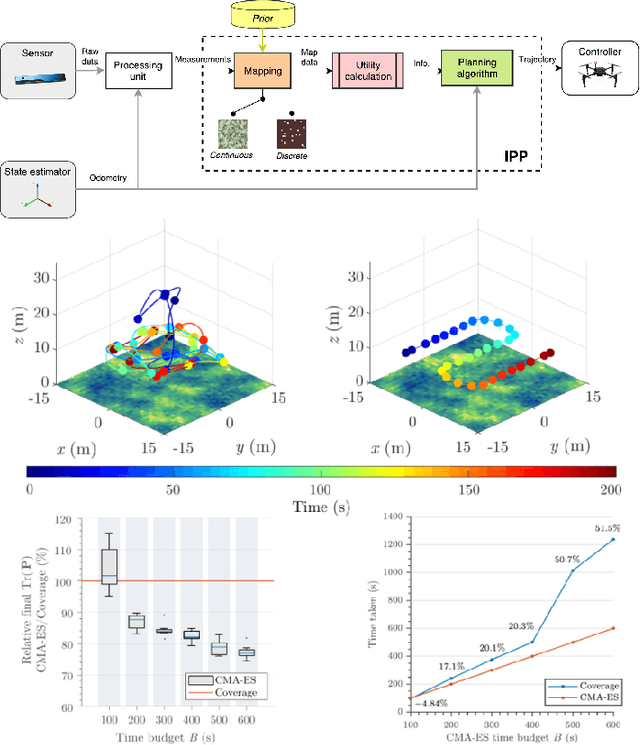
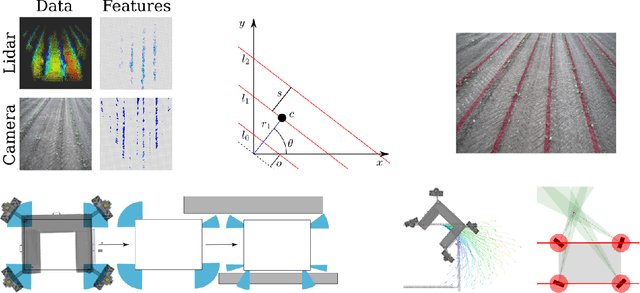
The application of autonomous robots in agriculture is gaining more and more popularity thanks to the high impact it may have on food security, sustainability, resource use efficiency, reduction of chemical treatments, minimization of the human effort and maximization of yield. The Flourish research project faced this challenge by developing an adaptable robotic solution for precision farming that combines the aerial survey capabilities of small autonomous unmanned aerial vehicles (UAVs) with flexible targeted intervention performed by multi-purpose agricultural unmanned ground vehicles (UGVs). This paper presents an exhaustive overview of the scientific and technological advances and outcomes obtained in the Flourish project. We introduce multi-spectral perception algorithms and aerial and ground based systems developed to monitor crop density, weed pressure, crop nitrogen nutrition status, and to accurately classify and locate weeds. We then introduce the navigation and mapping systems to deal with the specificity of the employed robots and of the agricultural environment, highlighting the collaborative modules that enable the UAVs and UGVs to collect and share information in a unified environment model. We finally present the ground intervention hardware, software solutions, and interfaces we implemented and tested in different field conditions and with different crops. We describe here a real use case in which a UAV collaborates with a UGV to monitor the field and to perform selective spraying treatments in a totally autonomous way.
Why did the Robot Cross the Road? - Learning from Multi-Modal Sensor Data for Autonomous Road Crossing
Sep 18, 2017
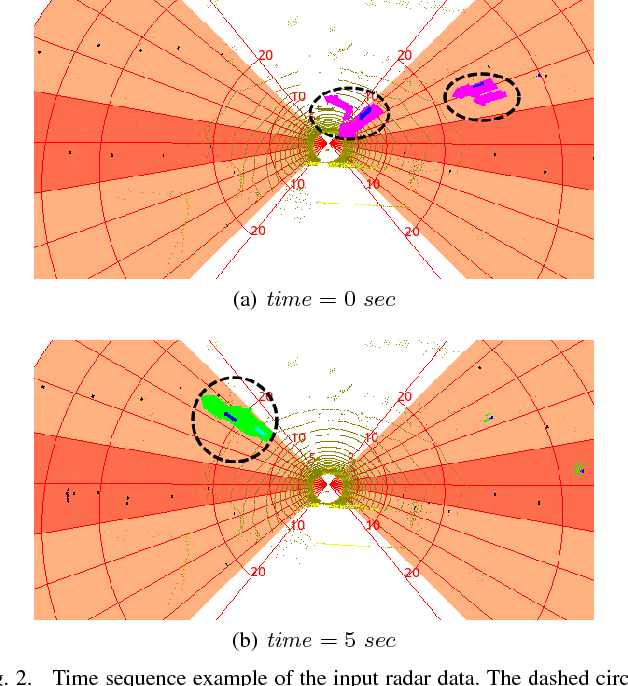
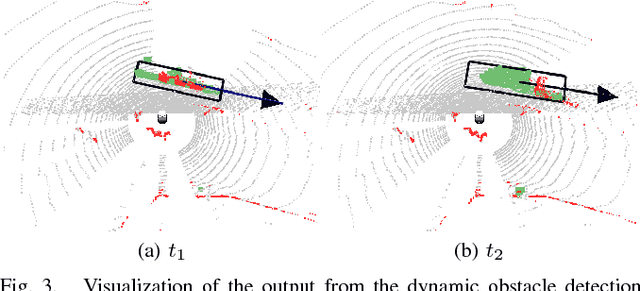
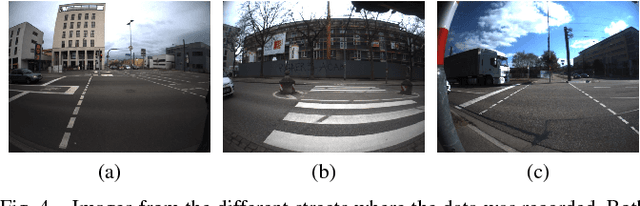
We consider the problem of developing robots that navigate like pedestrians on sidewalks through city centers for performing various tasks including delivery and surveillance. One particular challenge for such robots is crossing streets without pedestrian traffic lights. To solve this task the robot has to decide based on its sensory input if the road is clear. In this work, we propose a novel multi-modal learning approach for the problem of autonomous street crossing. Our approach solely relies on laser and radar data and learns a classifier based on Random Forests to predict when it is safe to cross the road. We present extensive experimental evaluations using real-world data collected from multiple street crossing situations which demonstrate that our approach yields a safe and accurate street crossing behavior and generalizes well over different types of situations. A comparison to alternative methods demonstrates the advantages of our approach.