 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKling-Omni Technical Report
Dec 18, 2025



We present Kling-Omni, a generalist generative framework designed to synthesize high-fidelity videos directly from multimodal visual language inputs. Adopting an end-to-end perspective, Kling-Omni bridges the functional separation among diverse video generation, editing, and intelligent reasoning tasks, integrating them into a holistic system. Unlike disjointed pipeline approaches, Kling-Omni supports a diverse range of user inputs, including text instructions, reference images, and video contexts, processing them into a unified multimodal representation to deliver cinematic-quality and highly-intelligent video content creation. To support these capabilities, we constructed a comprehensive data system that serves as the foundation for multimodal video creation. The framework is further empowered by efficient large-scale pre-training strategies and infrastructure optimizations for inference. Comprehensive evaluations reveal that Kling-Omni demonstrates exceptional capabilities in in-context generation, reasoning-based editing, and multimodal instruction following. Moving beyond a content creation tool, we believe Kling-Omni is a pivotal advancement toward multimodal world simulators capable of perceiving, reasoning, generating and interacting with the dynamic and complex worlds.
Improving Continual Relation Extraction by Distinguishing Analogous Semantics
May 11, 2023Continual relation extraction (RE) aims to learn constantly emerging relations while avoiding forgetting the learned relations. Existing works store a small number of typical samples to re-train the model for alleviating forgetting. However, repeatedly replaying these samples may cause the overfitting problem. We conduct an empirical study on existing works and observe that their performance is severely affected by analogous relations. To address this issue, we propose a novel continual extraction model for analogous relations. Specifically, we design memory-insensitive relation prototypes and memory augmentation to overcome the overfitting problem. We also introduce integrated training and focal knowledge distillation to enhance the performance on analogous relations. Experimental results show the superiority of our model and demonstrate its effectiveness in distinguishing analogous relations and overcoming overfitting.
Accurate non-stationary short-term traffic flow prediction method
May 01, 2022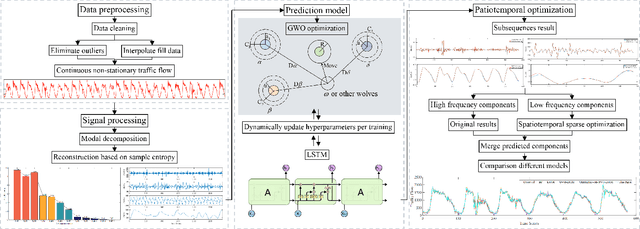
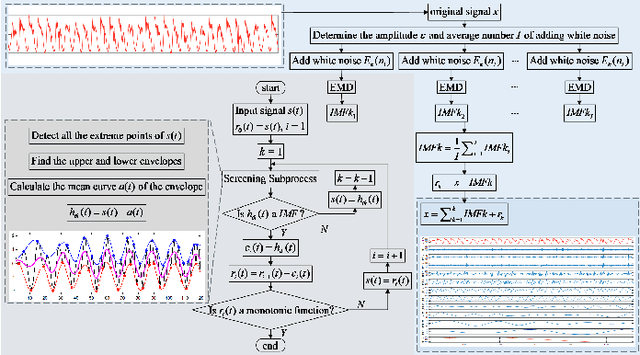
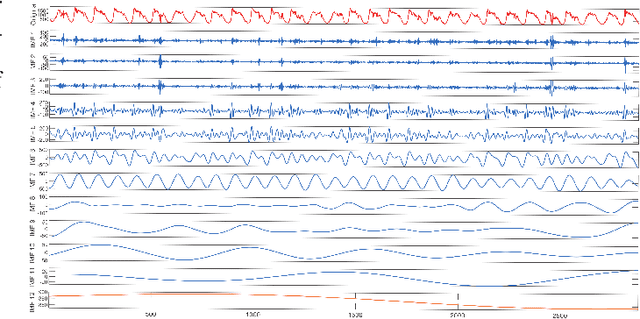

Precise and timely traffic flow prediction plays a critical role in developing intelligent transportation systems and has attracted considerable attention in recent decades. Despite the significant progress in this area brought by deep learning, challenges remain. Traffic flows usually change dramatically in a short period, which prevents the current methods from accurately capturing the future trend and likely causes the over-fitting problem, leading to unsatisfied accuracy. To this end, this paper proposes a Long Short-Term Memory (LSTM) based method that can forecast the short-term traffic flow precisely and avoid local optimum problems during training. Specifically, instead of using the non-stationary raw traffic data directly, we first decompose them into sub-components, where each one is less noisy than the original input. Afterward, Sample Entropy (SE) is employed to merge similar components to reduce the computation cost. The merged features are fed into the LSTM, and we then introduce a spatiotemporal module to consider the neighboring relationships in the recombined signals to avoid strong autocorrelation. During training, we utilize the Grey Wolf Algorithm (GWO) to optimize the parameters of LSTM, which overcome the overfitting issue. We conduct the experiments on a UK public highway traffic flow dataset, and the results show that the proposed method performs favorably against other state-of-the-art methods with better adaption performance on extreme outliers, delay effects, and trend-changing responses.
Coverage Path Planning for Robotic Quality Inspection with Control on Measurement Uncertainty
Jan 12, 2022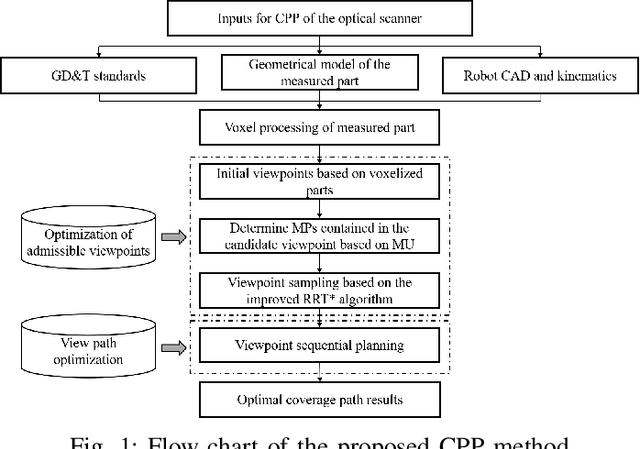
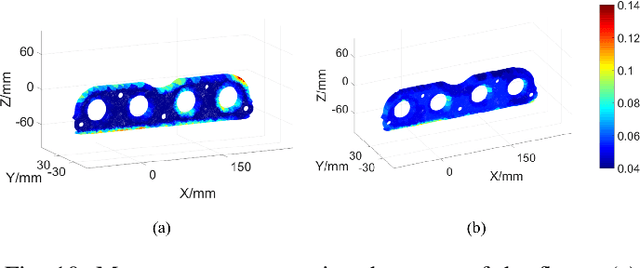
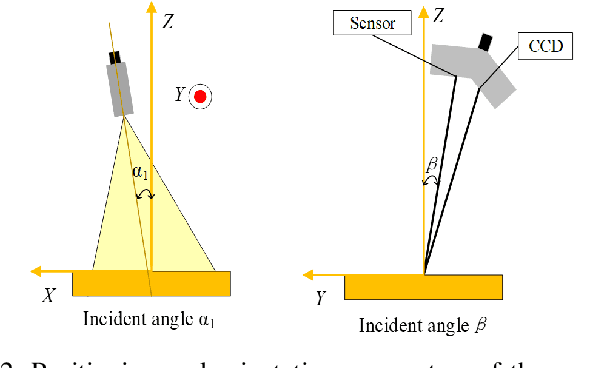
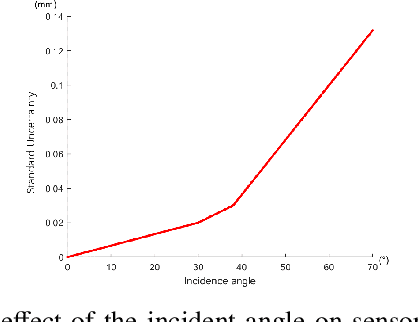
The optical scanning gauges mounted on the robots are commonly used in quality inspection, such as verifying the dimensional specification of sheet structures. Coverage path planning (CPP) significantly influences the accuracy and efficiency of robotic quality inspection. Traditional CPP strategies focus on minimizing the number of viewpoints or traveling distance of robots under the condition of full coverage inspection. The measurement uncertainty when collecting the scanning data is less considered in the free-form surface inspection. To address this problem, a novel CPP method with the optimal viewpoint sampling strategy is proposed to incorporate the measurement uncertainty of key measurement points (MPs) into free-form surface inspection. At first, the feasible ranges of measurement uncertainty are calculated based on the tolerance specifications of the MPs. The initial feasible viewpoint set is generated considering the measurement uncertainty and the visibility of MPs. Then, the inspection cost function is built to evaluate the number of selected viewpoints and the average measurement uncertainty in the field of views (FOVs) of all the selected viewpoints. Afterward, an enhanced rapidly-exploring random tree (RRT*) algorithm is proposed for viewpoint sampling using the inspection cost function and CPP optimization. Case studies, including simulation tests and inspection experiments, have been conducted to evaluate the effectiveness of the proposed method. Results show that the scanning precision of key MPs is significantly improved compared with the benchmark method.
Task Allocation and Coordinated Motion Planning for Autonomous Multi-Robot Optical Inspection Systems
Jun 15, 2021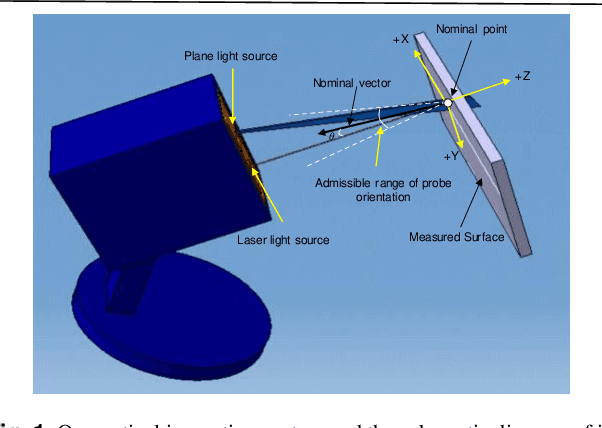
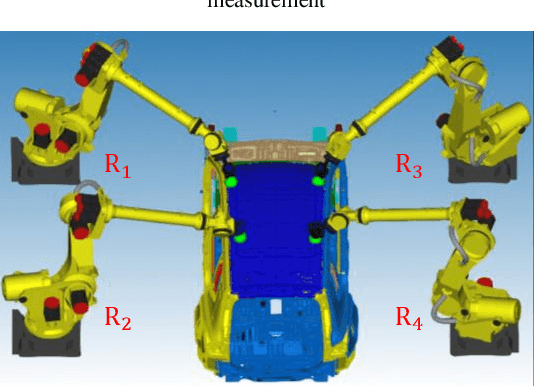
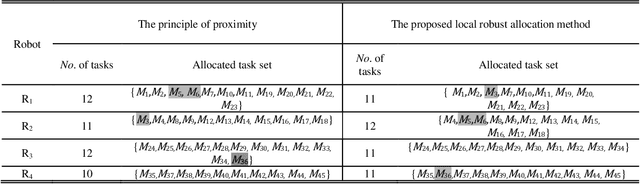
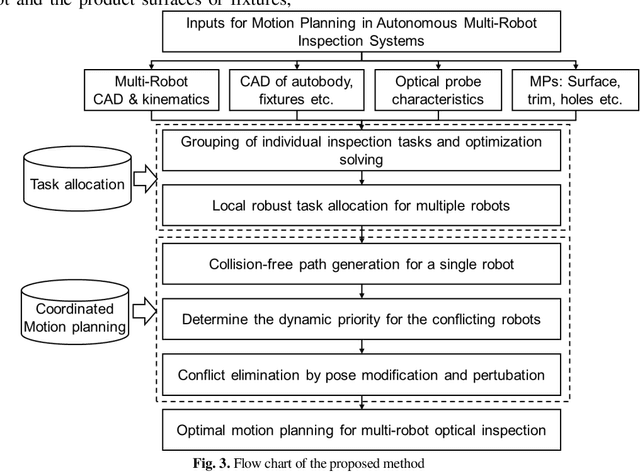
Autonomous multi-robot optical inspection systems are increasingly applied for obtaining inline measurements in process monitoring and quality control. Numerous methods for path planning and robotic coordination have been developed for static and dynamic environments and applied to different fields. However, these approaches may not work for the autonomous multi-robot optical inspection system due to fast computation requirements of inline optimization, unique characteristics on robotic end-effector orientations, and complex large-scale free-form product surfaces. This paper proposes a novel task allocation methodology for coordinated motion planning of multi-robot inspection. Specifically, (1) a local robust inspection task allocation is proposed to achieve efficient and well-balanced measurement assignment among robots; (2) collision-free path planning and coordinated motion planning are developed via dynamic searching in robotic coordinate space and perturbation of probe poses or local paths in the conflicting robots. A case study shows that the proposed approach can mitigate the risk of collisions between robots and environments, resolve conflicts among robots, and reduce the inspection cycle time significantly and consistently.
Optimal Path Planning for Automated Dimensional Inspection of Free-Form Surfaces
May 15, 2020
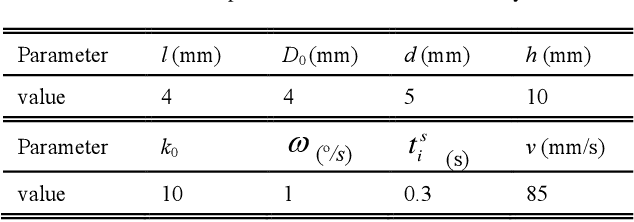
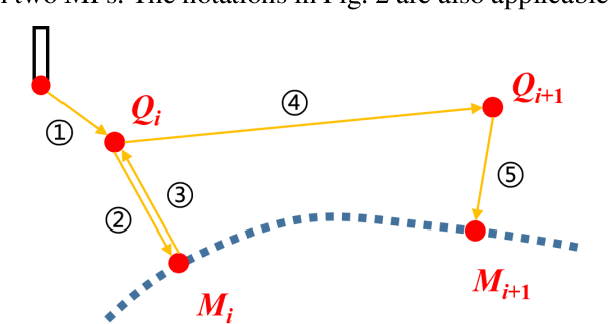
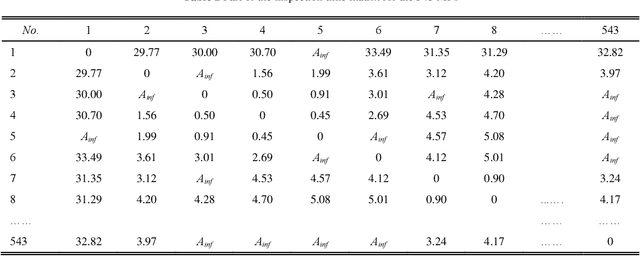
Structural dimensional inspection is vital for the process monitoring, quality control, and fault diagnosis in the mass production of auto bodies. Comparing with the non-contact measurement, the high-precision five-axis measuring machine with the touch-trigger probe is a preferred choice for data collection. It can assist manufacturers in making accurate inspection quickly. As the increase of free-form surfaces and diverse surface orientations in auto body design, existing inspection approaches cannot capture some new critical features in the curvature of auto bodies in an efficient way. Therefore, we need to develop new path planning methods for automated dimensional inspection of free-form surfaces. This paper proposes an optimal path planning system for automated programming of measuring point inspection by incorporating probe rotations and effective collision detection. Specifically, the methodological contributions include: (i) a dynamic searching volume-based algorithm is developed to detect potential collisions in the local path between measurement points; (ii) a local path generation method is proposed with the integration of the probe trajectory and the stylus rotation. Then, the inspection time matrix is proposed to quantify the measuring time of diverse local paths; (iii) an optimization approach of the global inspection path for all critical points on the auto body is developed to minimize the total inspection time. A case study has been conducted on an auto body to verify the performance of the proposed method. Results show that the collision-free path for the free-form auto body could be generated automatically with off-line programming, and the proposed method produces about 40% fewer dummy points and needs 32% less movement time in the auto body inspection process.