 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Super-Resolution Compressive Sensing: A Two-timescale Alternating MAP Approach
Aug 09, 2025The problem of super-resolution compressive sensing (SR-CS) is crucial for various wireless sensing and communication applications. Existing methods often suffer from limited resolution capabilities and sensitivity to hyper-parameters, hindering their ability to accurately recover sparse signals when the grid parameters do not lie precisely on a fixed grid and are close to each other. To overcome these limitations, this paper introduces a novel robust super-resolution compressive sensing algorithmic framework using a two-timescale alternating maximum a posteriori (MAP) approach. At the slow timescale, the proposed framework iterates between a sparse signal estimation module and a grid update module. In the sparse signal estimation module, a hyperbolic-tangent prior distribution based variational Bayesian inference (tanh-VBI) algorithm with a strong sparsity promotion capability is adopted to estimate the posterior probability of the sparse vector and accurately identify active grid components carrying primary energy under a dense grid. Subsequently, the grid update module utilizes the BFGS algorithm to refine these low-dimensional active grid components at a faster timescale to achieve super-resolution estimation of the grid parameters with a low computational cost. The proposed scheme is applied to the channel extrapolation problem, and simulation results demonstrate the superiority of the proposed scheme compared to baseline schemes.
Bilinear Subspace Variational Bayesian Inference for Joint Scattering Environment Sensing and Data Recovery in ISAC Systems
Feb 02, 2025This paper considers a joint scattering environment sensing and data recovery problem in an uplink integrated sensing and communication (ISAC) system. To facilitate joint scatterers localization and multi-user (MU) channel estimation, we introduce a three-dimensional (3D) location-domain sparse channel model to capture the joint sparsity of the MU channel (i.e., different user channels share partially overlapped scatterers). Then the joint problem is formulated as a bilinear structured sparse recovery problem with a dynamic position grid and imperfect parameters (such as time offset and user position errors). We propose an expectation maximization based turbo bilinear subspace variational Bayesian inference (EM-Turbo-BiSVBI) algorithm to solve the problem effectively, where the E-step performs Bayesian estimation of the the location-domain sparse MU channel by exploiting the joint sparsity, and the M-step refines the dynamic position grid and learns the imperfect factors via gradient update. Two methods are introduced to greatly reduce the complexity with almost no sacrifice on the performance and convergence speed: 1) a subspace constrained bilinear variational Bayesian inference (VBI) method is proposed to avoid any high-dimensional matrix inverse; 2) the multiple signal classification (MUSIC) and subspace constrained VBI methods are combined to obtain a coarse estimation result to reduce the search range. Simulations verify the advantages of the proposed scheme over baseline schemes.
Subspace Constrained Variational Bayesian Inference for Structured Compressive Sensing with a Dynamic Grid
Jul 24, 2024



We investigate the problem of recovering a structured sparse signal from a linear observation model with an uncertain dynamic grid in the sensing matrix. The state-of-the-art expectation maximization based compressed sensing (EM-CS) methods, such as turbo compressed sensing (Turbo-CS) and turbo variational Bayesian inference (Turbo-VBI), have a relatively slow convergence speed due to the double-loop iterations between the E-step and M-step. Moreover, each inner iteration in the E-step involves a high-dimensional matrix inverse in general, which is unacceptable for problems with large signal dimensions or real-time calculation requirements. Although there are some attempts to avoid the high-dimensional matrix inverse by majorization minimization, the convergence speed and accuracy are often sacrificed. To better address this problem, we propose an alternating estimation framework based on a novel subspace constrained VBI (SC-VBI) method, in which the high-dimensional matrix inverse is replaced by a low-dimensional subspace constrained matrix inverse (with the dimension equal to the sparsity level). We further prove the convergence of the SC-VBI to a stationary solution of the Kullback-Leibler divergence minimization problem. Simulations demonstrate that the proposed SC-VBI algorithm can achieve a much better tradeoff between complexity per iteration, convergence speed, and performance compared to the state-of-the-art algorithms.
Joint Visibility Region Detection and Channel Estimation for XL-MIMO Systems via Alternating MAP
May 07, 2024



We investigate a joint visibility region (VR) detection and channel estimation problem in extremely large-scale multiple-input-multiple-output (XL-MIMO) systems, where near-field propagation and spatial non-stationary effects exist. In this case, each scatterer can only see a subset of antennas, i.e., it has a certain VR over the antennas. Because of the spatial correlation among adjacent sub-arrays, VR of scatterers exhibits a two-dimensional (2D) clustered sparsity. We design a 2D Markov prior model to capture such a structured sparsity. Based on this, a novel alternating maximum a posteriori (MAP) framework is developed for high-accuracy VR detection and channel estimation. The alternating MAP framework consists of three basic modules: a channel estimation module, a VR detection module, and a grid update module. Specifically, the first module is a low-complexity inverse-free variational Bayesian inference (IF-VBI) algorithm that avoids the matrix inverse via minimizing a relaxed Kullback-Leibler (KL) divergence. The second module is a structured expectation propagation (EP) algorithm which has the ability to deal with complicated prior information. And the third module refines polar-domain grid parameters via gradient ascent. Simulations demonstrate the superiority of the proposed algorithm in both VR detection and channel estimation.
Successive Linear Approximation VBI for Joint Sparse Signal Recovery and Dynamic Grid Parameters Estimation
Jul 21, 2023



For many practical applications in wireless communications, we need to recover a structured sparse signal from a linear observation model with dynamic grid parameters in the sensing matrix. Conventional expectation maximization (EM)-based compressed sensing (CS) methods, such as turbo compressed sensing (Turbo-CS) and turbo variational Bayesian inference (Turbo-VBI), have double-loop iterations, where the inner loop (E-step) obtains a Bayesian estimation of sparse signals and the outer loop (M-step) obtains a point estimation of dynamic grid parameters. This leads to a slow convergence rate. Furthermore, each iteration of the E-step involves a complicated matrix inverse in general. To overcome these drawbacks, we first propose a successive linear approximation VBI (SLA-VBI) algorithm that can provide Bayesian estimation of both sparse signals and dynamic grid parameters. Besides, we simplify the matrix inverse operation based on the majorization-minimization (MM) algorithmic framework. In addition, we extend our proposed algorithm from an independent sparse prior to more complicated structured sparse priors, which can exploit structured sparsity in specific applications to further enhance the performance. Finally, we apply our proposed algorithm to solve two practical application problems in wireless communications and verify that the proposed algorithm can achieve faster convergence, lower complexity, and better performance compared to the state-of-the-art EM-based methods.
Joint Scattering Environment Sensing and Channel Estimation Based on Non-stationary Markov Random Field
Feb 06, 2023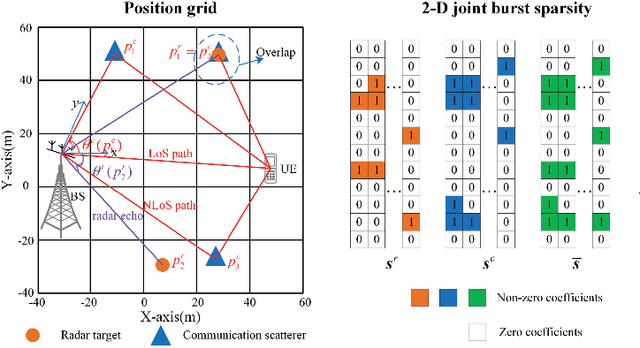


This paper considers an integrated sensing and communication system, where some radar targets also serve as communication scatterers. A location domain channel modeling method is proposed based on the position of targets and scatterers in the scattering environment, and the resulting radar and communication channels exhibit a two-dimensional (2-D) joint burst sparsity. We propose a joint scattering environment sensing and channel estimation scheme to enhance the target/scatterer localization and channel estimation performance simultaneously, where a spatially non-stationary Markov random field (MRF) model is proposed to capture the 2-D joint burst sparsity. Specifically, the base station (BS) first transmits downlink pilots to sense the targets in the scattering environment. Then the user transmits uplink pilots to estimate the communication channel. Finally, joint scattering environment sensing and channel estimation are performed at the BS based on the reflected downlink pilot signal and received uplink pilot signal. A message passing based algorithm is designed based on the turbo approach. Furthermore, a variation of the expectation maximization method, based on pseudo-likelihood approximation, is proposed to learn the unknown parameters in the non-stationary MRF model that capture the random sizes and locations of the scattering clusters. The advantages of our proposed scheme are verified in the simulations.
Joint Scattering Environment Sensing and Channel Estimation for Integrated Sensing and Communication
Feb 03, 2023



This paper considers an integrated sensing and communication system, where some radar targets also serve as communication scatterers. A location domain channel modeling method is proposed based on the position of targets and scatterers in the scattering environment, and the resulting radar and communication channels exhibit a partially common sparsity. By exploiting this, we propose a joint scattering environment sensing and channel estimation scheme to enhance the target/scatterer localization and channel estimation performance simultaneously. Specifically, the base station (BS) first transmits downlink pilots to sense the targets in the scattering environment. Then the user transmits uplink pilots to estimate the communication channel. Finally, joint scattering environment sensing and channel estimation are performed at the BS based on the reflected downlink pilot signal and received uplink pilot signal. A message passing based algorithm is designed by combining the turbo approach and the expectation maximization method. The advantages of our proposed scheme are verified in the simulations.