 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Smoothing Distribution Exploration for Backdoor Neutralization in Deep Learning-based Traffic Systems
Mar 24, 2023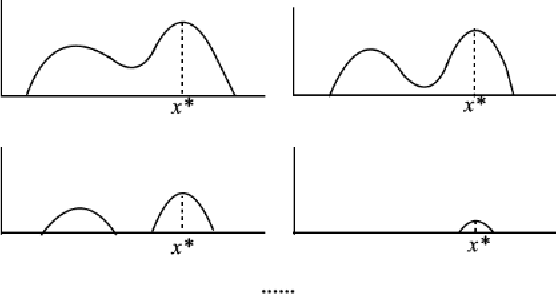
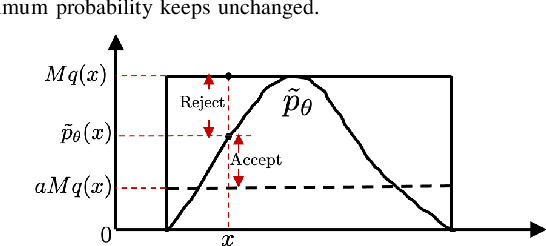
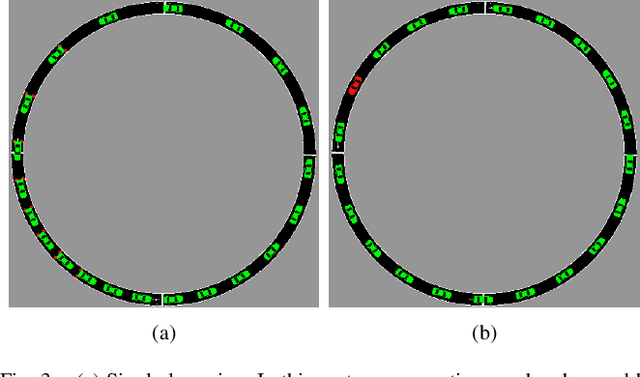
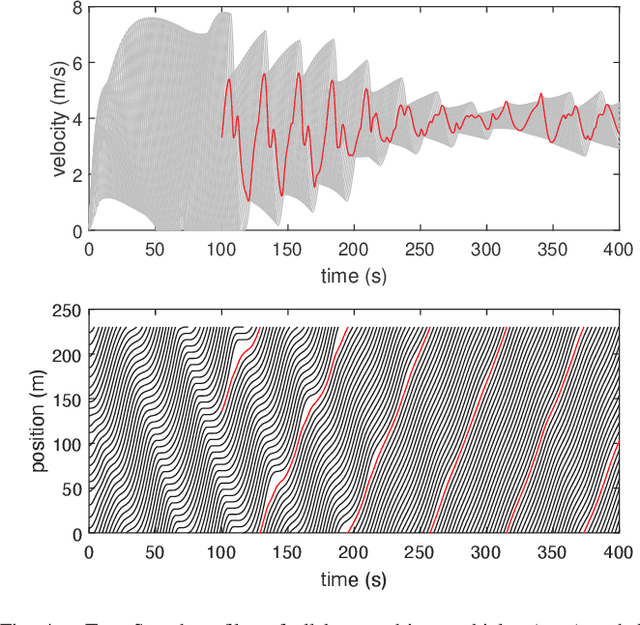
Deep Reinforcement Learning (DRL) enhances the efficiency of Autonomous Vehicles (AV), but also makes them susceptible to backdoor attacks that can result in traffic congestion or collisions. Backdoor functionality is typically incorporated by contaminating training datasets with covert malicious data to maintain high precision on genuine inputs while inducing the desired (malicious) outputs for specific inputs chosen by adversaries. Current defenses against backdoors mainly focus on image classification using image-based features, which cannot be readily transferred to the regression task of DRL-based AV controllers since the inputs are continuous sensor data, i.e., the combinations of velocity and distance of AV and its surrounding vehicles. Our proposed method adds well-designed noise to the input to neutralize backdoors. The approach involves learning an optimal smoothing (noise) distribution to preserve the normal functionality of genuine inputs while neutralizing backdoors. By doing so, the resulting model is expected to be more resilient against backdoor attacks while maintaining high accuracy on genuine inputs. The effectiveness of the proposed method is verified on a simulated traffic system based on a microscopic traffic simulator, where experimental results showcase that the smoothed traffic controller can neutralize all trigger samples and maintain the performance of relieving traffic congestion
An Interactive Greedy Approach to Group Sparsity in High Dimensions
Sep 26, 2018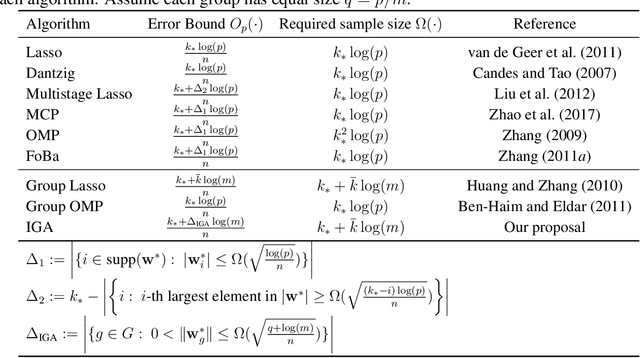
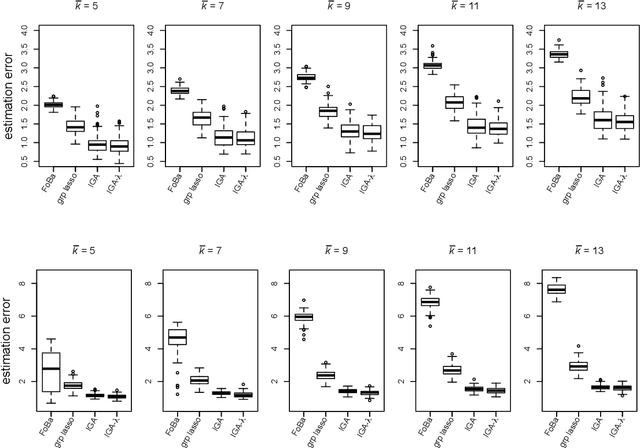
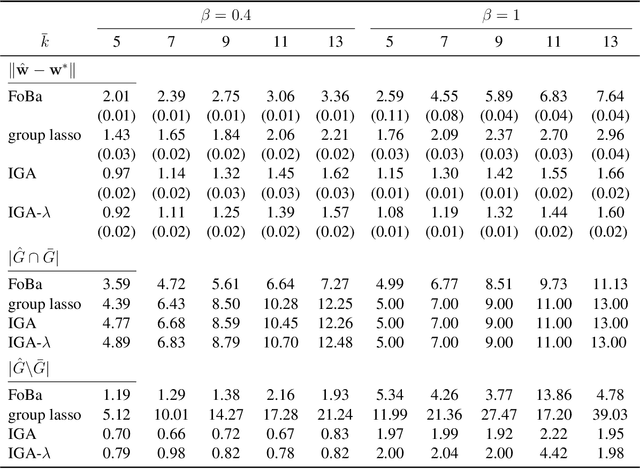
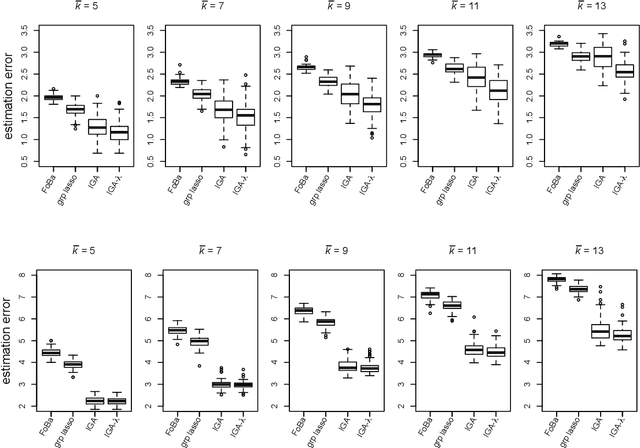
Sparsity learning with known grouping structure has received considerable attention due to wide modern applications in high-dimensional data analysis. Although advantages of using group information have been well-studied by shrinkage-based approaches, benefits of group sparsity have not been well-documented for greedy-type methods, which much limits our understanding and use of this important class of methods. In this paper, generalizing from a popular forward-backward greedy approach, we propose a new interactive greedy algorithm for group sparsity learning and prove that the proposed greedy-type algorithm attains the desired benefits of group sparsity under high dimensional settings. An estimation error bound refining other existing methods and a guarantee for group support recovery are also established simultaneously. In addition, we incorporate a general M-estimation framework and introduce an interactive feature to allow extra algorithm flexibility without compromise in theoretical properties. The promising use of our proposal is demonstrated through numerical evaluations including a real industrial application in human activity recognition at home. Supplementary materials for this article are available online.