 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSharpNet: Enhancing MLPs to Represent Functions with Controlled Non-differentiability
Jan 27, 2026Multi-layer perceptrons (MLPs) are a standard tool for learning and function approximation, but they inherently yield outputs that are globally smooth. As a result, they struggle to represent functions that are continuous yet deliberately non-differentiable (i.e., with prescribed $C^0$ sharp features) without relying on ad hoc post-processing. We present SharpNet, a modified MLP architecture capable of encoding functions with user-defined sharp features by enriching the network with an auxiliary feature function, which is defined as the solution to a Poisson equation with jump Neumann boundary conditions. It is evaluated via an efficient local integral that is fully differentiable with respect to the feature locations, enabling our method to jointly optimize both the feature locations and the MLP parameters to recover the target functions/models. The $C^0$-continuity of SharpNet is precisely controllable, ensuring $C^0$-continuity at the feature locations and smoothness elsewhere. We validate SharpNet on 2D problems and 3D CAD model reconstruction, and compare it against several state-of-the-art baselines. In both types of tasks, SharpNet accurately recovers sharp edges and corners while maintaining smooth behavior away from those features, whereas existing methods tend to smooth out gradient discontinuities. Both qualitative and quantitative evaluations highlight the benefits of our approach.
A Divide-and-Conquer Approach for Global Orientation of Non-Watertight Scene-Level Point Clouds Using 0-1 Integer Optimization
May 29, 2025Orienting point clouds is a fundamental problem in computer graphics and 3D vision, with applications in reconstruction, segmentation, and analysis. While significant progress has been made, existing approaches mainly focus on watertight, object-level 3D models. The orientation of large-scale, non-watertight 3D scenes remains an underexplored challenge. To address this gap, we propose DACPO (Divide-And-Conquer Point Orientation), a novel framework that leverages a divide-and-conquer strategy for scalable and robust point cloud orientation. Rather than attempting to orient an unbounded scene at once, DACPO segments the input point cloud into smaller, manageable blocks, processes each block independently, and integrates the results through a global optimization stage. For each block, we introduce a two-step process: estimating initial normal orientations by a randomized greedy method and refining them by an adapted iterative Poisson surface reconstruction. To achieve consistency across blocks, we model inter-block relationships using an an undirected graph, where nodes represent blocks and edges connect spatially adjacent blocks. To reliably evaluate orientation consistency between adjacent blocks, we introduce the concept of the visible connected region, which defines the region over which visibility-based assessments are performed. The global integration is then formulated as a 0-1 integer-constrained optimization problem, with block flip states as binary variables. Despite the combinatorial nature of the problem, DACPO remains scalable by limiting the number of blocks (typically a few hundred for 3D scenes) involved in the optimization. Experiments on benchmark datasets demonstrate DACPO's strong performance, particularly in challenging large-scale, non-watertight scenarios where existing methods often fail. The source code is available at https://github.com/zd-lee/DACPO.
From Transparent to Opaque: Rethinking Neural Implicit Surfaces with $α$-NeuS
Nov 08, 2024



Traditional 3D shape reconstruction techniques from multi-view images, such as structure from motion and multi-view stereo, primarily focus on opaque surfaces. Similarly, recent advances in neural radiance fields and its variants also primarily address opaque objects, encountering difficulties with the complex lighting effects caused by transparent materials. This paper introduces $\alpha$-NeuS, a new method for simultaneously reconstructing thin transparent objects and opaque objects based on neural implicit surfaces (NeuS). Our method leverages the observation that transparent surfaces induce local extreme values in the learned distance fields during neural volumetric rendering, contrasting with opaque surfaces that align with zero level sets. Traditional iso-surfacing algorithms such as marching cubes, which rely on fixed iso-values, are ill-suited for this data. We address this by taking the absolute value of the distance field and developing an optimization method that extracts level sets corresponding to both non-negative local minima and zero iso-values. We prove that the reconstructed surfaces are unbiased for both transparent and opaque objects. To validate our approach, we construct a benchmark that includes both real-world and synthetic scenes, demonstrating its practical utility and effectiveness. Our data and code are publicly available at https://github.com/728388808/alpha-NeuS.
DCUDF2: Improving Efficiency and Accuracy in Extracting Zero Level Sets from Unsigned Distance Fields
Aug 30, 2024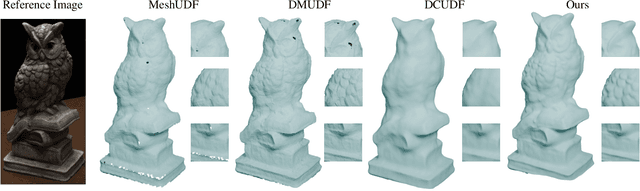
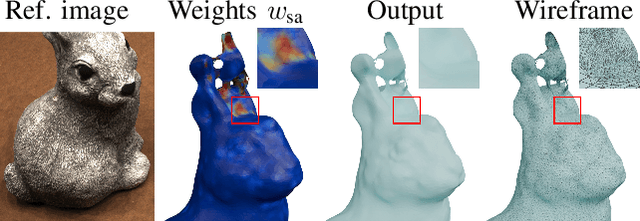
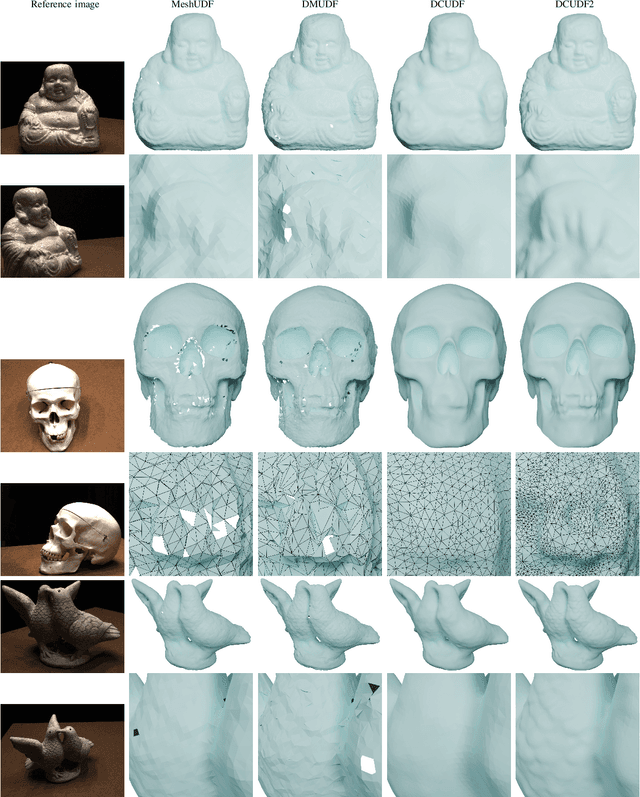
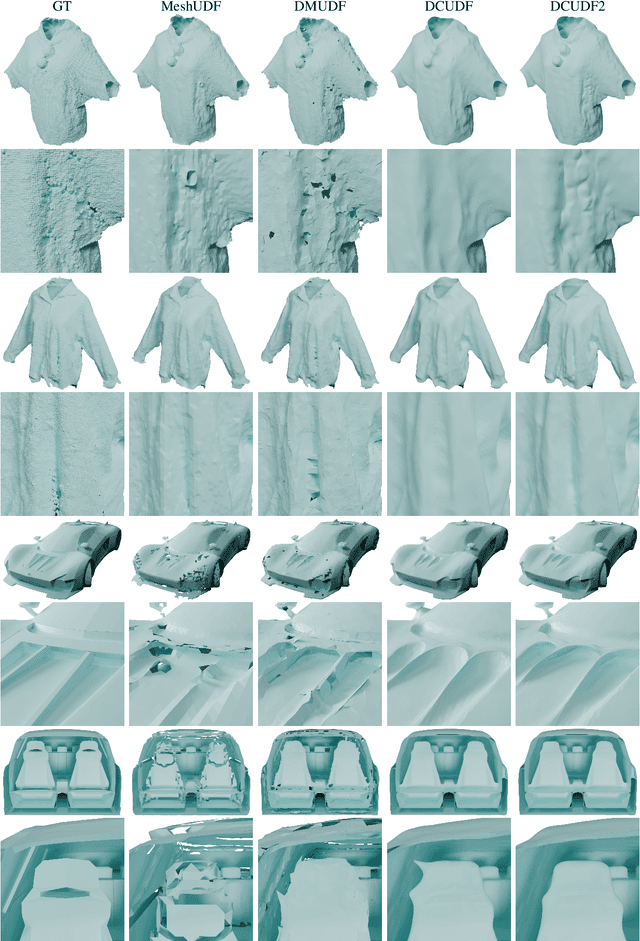
Unsigned distance fields (UDFs) allow for the representation of models with complex topologies, but extracting accurate zero level sets from these fields poses significant challenges, particularly in preserving topological accuracy and capturing fine geometric details. To overcome these issues, we introduce DCUDF2, an enhancement over DCUDF--the current state-of-the-art method--for extracting zero level sets from UDFs. Our approach utilizes an accuracy-aware loss function, enhanced with self-adaptive weights, to improve geometric quality significantly. We also propose a topology correction strategy that reduces the dependence on hyper-parameter, increasing the robustness of our method. Furthermore, we develop new operations leveraging self-adaptive weights to boost runtime efficiency. Extensive experiments on surface extraction across diverse datasets demonstrate that DCUDF2 outperforms DCUDF and existing methods in both geometric fidelity and topological accuracy. We will make the source code publicly available.
Details Enhancement in Unsigned Distance Field Learning for High-fidelity 3D Surface Reconstruction
Jun 01, 2024



While Signed Distance Fields (SDF) are well-established for modeling watertight surfaces, Unsigned Distance Fields (UDF) broaden the scope to include open surfaces and models with complex inner structures. Despite their flexibility, UDFs encounter significant challenges in high-fidelity 3D reconstruction, such as non-differentiability at the zero level set, difficulty in achieving the exact zero value, numerous local minima, vanishing gradients, and oscillating gradient directions near the zero level set. To address these challenges, we propose Details Enhanced UDF (DEUDF) learning that integrates normal alignment and the SIREN network for capturing fine geometric details, adaptively weighted Eikonal constraints to address vanishing gradients near the target surface, unconditioned MLP-based UDF representation to relax non-negativity constraints, and a UDF-tailored method for extracting iso-surface with non-constant iso-values. These strategies collectively stabilize the learning process from unoriented point clouds and enhance the accuracy of UDFs. Our computational results demonstrate that DEUDF outperforms existing UDF learning methods in both accuracy and the quality of reconstructed surfaces. We will make the source code publicly available.
Robust Zero Level-Set Extraction from Unsigned Distance Fields Based on Double Covering
Oct 16, 2023



In this paper, we propose a new method, called DoubleCoverUDF, for extracting the zero level-set from unsigned distance fields (UDFs). DoubleCoverUDF takes a learned UDF and a user-specified parameter $r$ (a small positive real number) as input and extracts an iso-surface with an iso-value $r$ using the conventional marching cubes algorithm. We show that the computed iso-surface is the boundary of the $r$-offset volume of the target zero level-set $S$, which is an orientable manifold, regardless of the topology of $S$. Next, the algorithm computes a covering map to project the boundary mesh onto $S$, preserving the mesh's topology and avoiding folding. If $S$ is an orientable manifold surface, our algorithm separates the double-layered mesh into a single layer using a robust minimum-cut post-processing step. Otherwise, it keeps the double-layered mesh as the output. We validate our algorithm by reconstructing 3D surfaces of open models and demonstrate its efficacy and effectiveness on synthetic models and benchmark datasets. Our experimental results confirm that our method is robust and produces meshes with better quality in terms of both visual evaluation and quantitative measures than existing UDF-based methods. The source code is available at https://github.com/jjjkkyz/DCUDF.
Improved Real-time Image Smoothing with Weak Structures Preserved and High-contrast Details Removed
Jul 12, 2023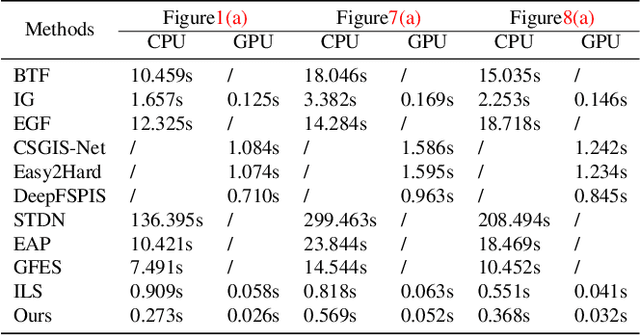
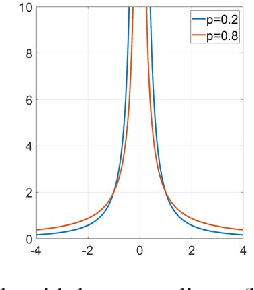
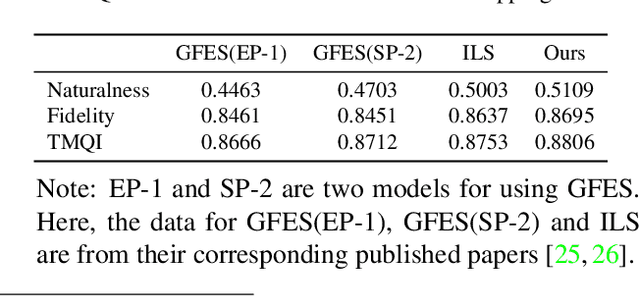
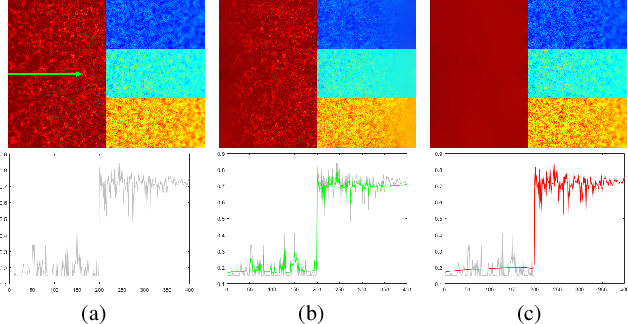
Image smoothing is by reducing pixel-wise gradients to smooth out details. As existing methods always rely on gradients to determine smoothing manners, it is difficult to distinguish structures and details to handle distinctively due to the overlapped ranges of gradients for structures and details. Thus, it is still challenging to achieve high-quality results, especially on preserving weak structures and removing high-contrast details. In this paper, we address this challenge by improving the real-time optimization-based method via iterative least squares (called ILS). We observe that 1) ILS uses gradients as the independent variable in its penalty function for determining smoothing manners, and 2) the framework of ILS can still work for image smoothing when we use some values instead of gradients in the penalty function. Thus, corresponding to the properties of pixels on structures or not, we compute some values to use in the penalty function to determine smoothing manners, and so we can handle structures and details distinctively, no matter whether their gradients are high or low. As a result, we can conveniently remove high-contrast details while preserving weak structures. Moreover, such values can be adjusted to accelerate optimization computation, so that we can use fewer iterations than the original ILS method for efficiency. This also reduces the changes onto structures to help structure preservation. Experimental results show our advantages over existing methods on efficiency and quality.
NeUDF: Learning Unsigned Distance Fields from Multi-view Images for Reconstructing Non-watertight Models
Mar 27, 2023



Volume rendering-based 3D reconstruction from multi-view images has gained popularity in recent years, largely due to the success of neural radiance fields (NeRF). A number of methods have been developed that build upon NeRF and use neural volume rendering to learn signed distance fields (SDFs) for reconstructing 3D models. However, SDF-based methods cannot represent non-watertight models and, therefore, cannot capture open boundaries. This paper proposes a new algorithm for learning an accurate unsigned distance field (UDF) from multi-view images, which is specifically designed for reconstructing non-watertight, textureless models. The proposed method, called NeUDF, addresses the limitations of existing UDF-based methods by introducing a simple and approximately unbiased and occlusion-aware density function. In addition, a smooth and differentiable UDF representation is presented to make the learning process easier and more efficient. Experiments on both texture-rich and textureless models demonstrate the robustness and effectiveness of the proposed approach, making it a promising solution for reconstructing challenging 3D models from multi-view images.