 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLycheeDecode: Accelerating Long-Context LLM Inference via Hybrid-Head Sparse Decoding
Feb 04, 2026The proliferation of long-context large language models (LLMs) exposes a key bottleneck: the rapidly expanding key-value cache during decoding, which imposes heavy memory and latency costs. While recent approaches attempt to alleviate this by sharing a single set of crucial tokens across layers, such coarse-grained sharing undermines model performance by neglecting the functional diversity of attention heads. To address this, we propose LycheeDecode, an efficient decoding method centered on a fine-grained hybrid-head attention mechanism that employs a hardware-efficient top-k selection strategy. Specifically, the novel HardKuma-based mechanism partitions attention heads into a small subset of retrieval heads that dynamically identify crucial tokens and a majority of sparse heads that reuse them for efficient computation. Through extensive experiments on leading models like Llama3 and Qwen3 across diverse benchmarks for long-context understanding (e.g., LongBench, RULER) and complex reasoning (e.g., AIME24, OlympiadBench), we demonstrate that LycheeDecode achieves generative quality comparable to, and at times surpassing even the full-attention baseline. Crucially, this is accomplished with up to a 2.7x speedup at a 128K context length. By preserving the functional diversity of attention heads, our fine-grained strategy overcomes the performance bottlenecks of existing methods, providing a powerful and validated pathway to both efficient and high-quality long-context LLM inference.
Voronoi-Assisted Diffusion for Computing Unsigned Distance Fields from Unoriented Points
Oct 14, 2025Unsigned Distance Fields (UDFs) provide a flexible representation for 3D shapes with arbitrary topology, including open and closed surfaces, orientable and non-orientable geometries, and non-manifold structures. While recent neural approaches have shown promise in learning UDFs, they often suffer from numerical instability, high computational cost, and limited controllability. We present a lightweight, network-free method, Voronoi-Assisted Diffusion (VAD), for computing UDFs directly from unoriented point clouds. Our approach begins by assigning bi-directional normals to input points, guided by two Voronoi-based geometric criteria encoded in an energy function for optimal alignment. The aligned normals are then diffused to form an approximate UDF gradient field, which is subsequently integrated to recover the final UDF. Experiments demonstrate that VAD robustly handles watertight and open surfaces, as well as complex non-manifold and non-orientable geometries, while remaining computationally efficient and stable.
From Transparent to Opaque: Rethinking Neural Implicit Surfaces with $α$-NeuS
Nov 08, 2024



Traditional 3D shape reconstruction techniques from multi-view images, such as structure from motion and multi-view stereo, primarily focus on opaque surfaces. Similarly, recent advances in neural radiance fields and its variants also primarily address opaque objects, encountering difficulties with the complex lighting effects caused by transparent materials. This paper introduces $\alpha$-NeuS, a new method for simultaneously reconstructing thin transparent objects and opaque objects based on neural implicit surfaces (NeuS). Our method leverages the observation that transparent surfaces induce local extreme values in the learned distance fields during neural volumetric rendering, contrasting with opaque surfaces that align with zero level sets. Traditional iso-surfacing algorithms such as marching cubes, which rely on fixed iso-values, are ill-suited for this data. We address this by taking the absolute value of the distance field and developing an optimization method that extracts level sets corresponding to both non-negative local minima and zero iso-values. We prove that the reconstructed surfaces are unbiased for both transparent and opaque objects. To validate our approach, we construct a benchmark that includes both real-world and synthetic scenes, demonstrating its practical utility and effectiveness. Our data and code are publicly available at https://github.com/728388808/alpha-NeuS.
DCUDF2: Improving Efficiency and Accuracy in Extracting Zero Level Sets from Unsigned Distance Fields
Aug 30, 2024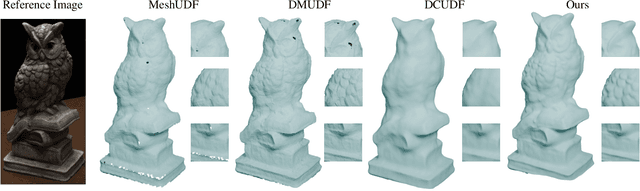
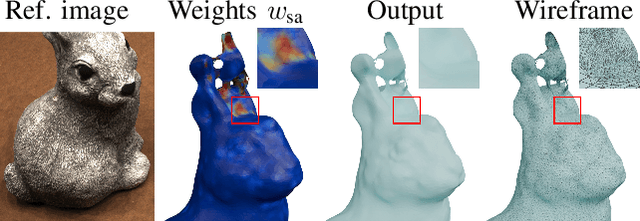
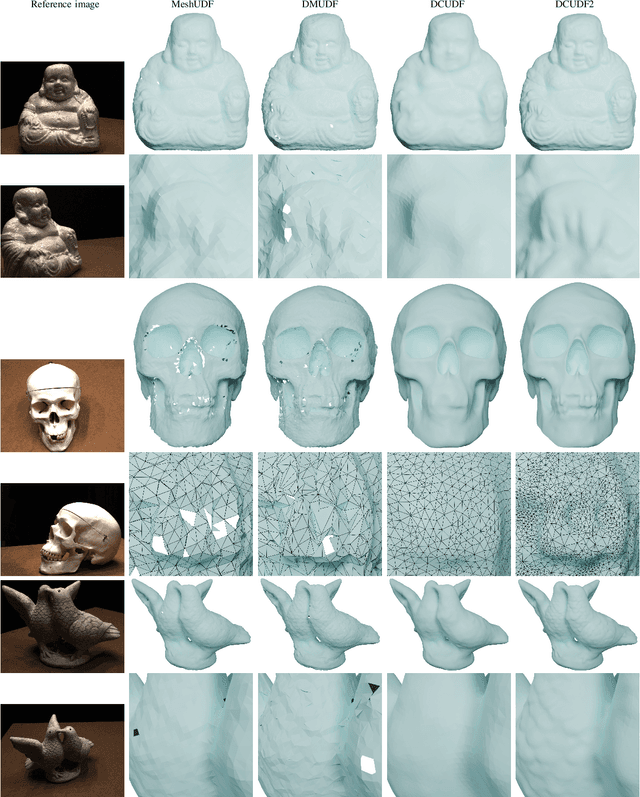
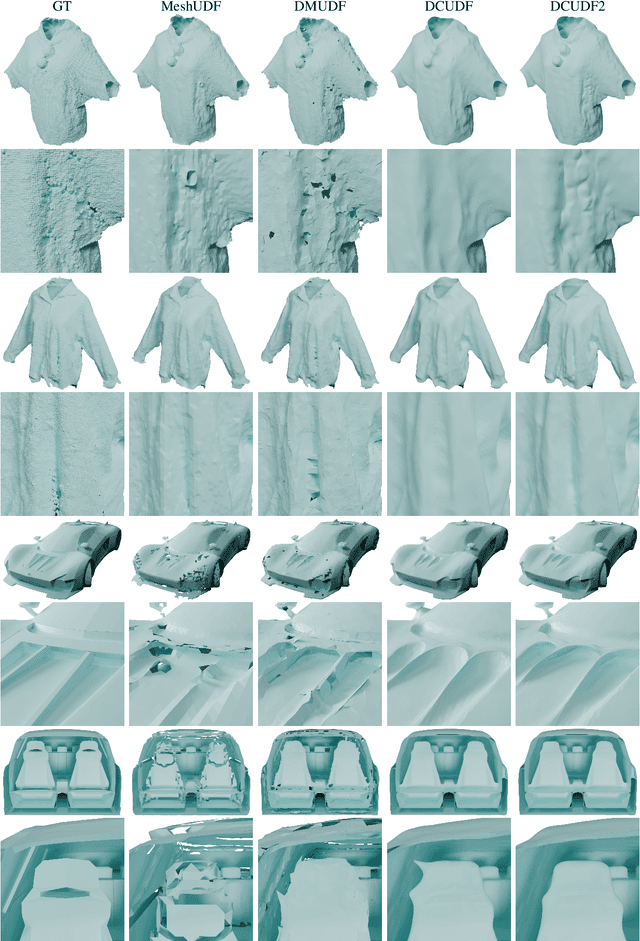
Unsigned distance fields (UDFs) allow for the representation of models with complex topologies, but extracting accurate zero level sets from these fields poses significant challenges, particularly in preserving topological accuracy and capturing fine geometric details. To overcome these issues, we introduce DCUDF2, an enhancement over DCUDF--the current state-of-the-art method--for extracting zero level sets from UDFs. Our approach utilizes an accuracy-aware loss function, enhanced with self-adaptive weights, to improve geometric quality significantly. We also propose a topology correction strategy that reduces the dependence on hyper-parameter, increasing the robustness of our method. Furthermore, we develop new operations leveraging self-adaptive weights to boost runtime efficiency. Extensive experiments on surface extraction across diverse datasets demonstrate that DCUDF2 outperforms DCUDF and existing methods in both geometric fidelity and topological accuracy. We will make the source code publicly available.
Robust Zero Level-Set Extraction from Unsigned Distance Fields Based on Double Covering
Oct 16, 2023



In this paper, we propose a new method, called DoubleCoverUDF, for extracting the zero level-set from unsigned distance fields (UDFs). DoubleCoverUDF takes a learned UDF and a user-specified parameter $r$ (a small positive real number) as input and extracts an iso-surface with an iso-value $r$ using the conventional marching cubes algorithm. We show that the computed iso-surface is the boundary of the $r$-offset volume of the target zero level-set $S$, which is an orientable manifold, regardless of the topology of $S$. Next, the algorithm computes a covering map to project the boundary mesh onto $S$, preserving the mesh's topology and avoiding folding. If $S$ is an orientable manifold surface, our algorithm separates the double-layered mesh into a single layer using a robust minimum-cut post-processing step. Otherwise, it keeps the double-layered mesh as the output. We validate our algorithm by reconstructing 3D surfaces of open models and demonstrate its efficacy and effectiveness on synthetic models and benchmark datasets. Our experimental results confirm that our method is robust and produces meshes with better quality in terms of both visual evaluation and quantitative measures than existing UDF-based methods. The source code is available at https://github.com/jjjkkyz/DCUDF.
NeUDF: Learning Unsigned Distance Fields from Multi-view Images for Reconstructing Non-watertight Models
Mar 27, 2023



Volume rendering-based 3D reconstruction from multi-view images has gained popularity in recent years, largely due to the success of neural radiance fields (NeRF). A number of methods have been developed that build upon NeRF and use neural volume rendering to learn signed distance fields (SDFs) for reconstructing 3D models. However, SDF-based methods cannot represent non-watertight models and, therefore, cannot capture open boundaries. This paper proposes a new algorithm for learning an accurate unsigned distance field (UDF) from multi-view images, which is specifically designed for reconstructing non-watertight, textureless models. The proposed method, called NeUDF, addresses the limitations of existing UDF-based methods by introducing a simple and approximately unbiased and occlusion-aware density function. In addition, a smooth and differentiable UDF representation is presented to make the learning process easier and more efficient. Experiments on both texture-rich and textureless models demonstrate the robustness and effectiveness of the proposed approach, making it a promising solution for reconstructing challenging 3D models from multi-view images.
Smart Power Supply for UAV Agility Enhancement Using Deep Neural Networks
Jan 08, 2022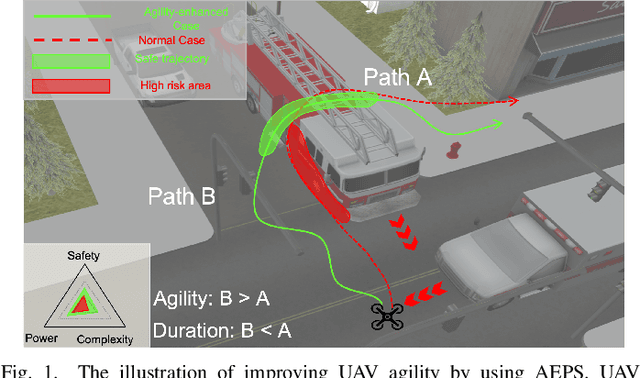
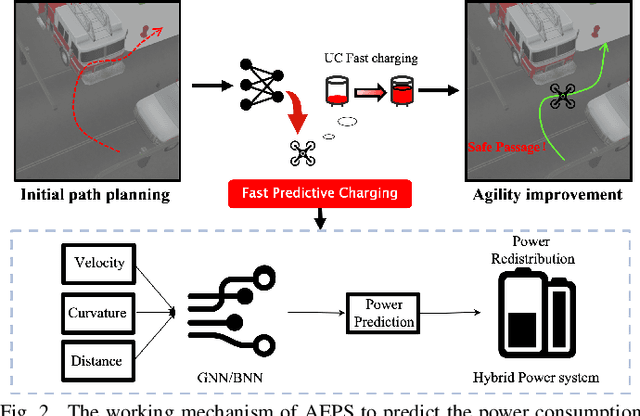


Recently unmanned aerial vehicles (UAV) have been widely deployed in various real-world scenarios such as disaster rescue and package delivery. Many of these working environments are unstructured with uncertain and dynamic obstacles. UAV collision frequently happens. An UAV with high agility is highly desired to adjust its motions to adapt to these environmental dynamics. However, UAV agility is restricted by its battery power output; particularly, an UAV's power system cannot be aware of its actual power need in motion planning while the need is dynamically changing as the environment and UAV condition vary. It is difficult to accurately and timely align the power supply with power needs in motion plannings. This mismatching will lead to an insufficient power supply to an UAV and cause delayed motion adjustments, largely increasing the risk of collisions with obstacles and therefore undermine UAV agility. To improve UAV agility, a novel intelligent power solution, Agility-Enhanced Power Supply (AEPS), was developed to proactively prepare appropriate amount powers at the right timing to support motion planning with enhanced agility. This method builds a bridge between the physical power system and UAV planning. With agility-enhanced motion planning, the safety of UAV in complex working environment will be enhanced. To evaluate AEPS effectiveness, missions of "patrol missions for community security" with unexpected obstacles were adopted; the power supply is realized by hybrid integration of fuel cell, battery, and capacitor. The effectiveness of AEPS in improving UAV agility was validated by the successful and timely power supply, improved task success rate and system safety, and reduced mission duration.