 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopo4D: Topology-Preserving Gaussian Splatting for High-Fidelity 4D Head Capture
Jun 01, 20244D head capture aims to generate dynamic topological meshes and corresponding texture maps from videos, which is widely utilized in movies and games for its ability to simulate facial muscle movements and recover dynamic textures in pore-squeezing. The industry often adopts the method involving multi-view stereo and non-rigid alignment. However, this approach is prone to errors and heavily reliant on time-consuming manual processing by artists. To simplify this process, we propose Topo4D, a novel framework for automatic geometry and texture generation, which optimizes densely aligned 4D heads and 8K texture maps directly from calibrated multi-view time-series images. Specifically, we first represent the time-series faces as a set of dynamic 3D Gaussians with fixed topology in which the Gaussian centers are bound to the mesh vertices. Afterward, we perform alternative geometry and texture optimization frame-by-frame for high-quality geometry and texture learning while maintaining temporal topology stability. Finally, we can extract dynamic facial meshes in regular wiring arrangement and high-fidelity textures with pore-level details from the learned Gaussians. Extensive experiments show that our method achieves superior results than the current SOTA face reconstruction methods both in the quality of meshes and textures. Project page: https://xuanchenli.github.io/Topo4D/.
Self-organizing Nervous Systems for Robot Swarms
Jan 23, 2024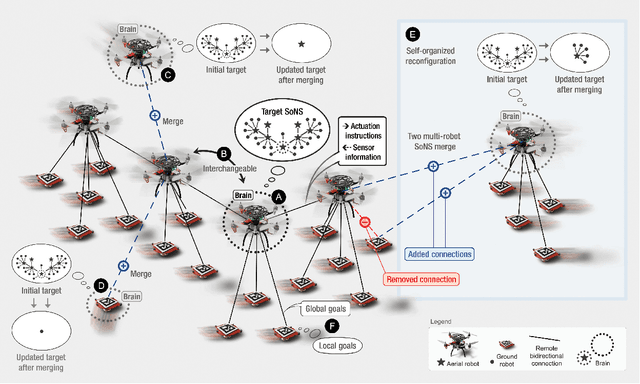

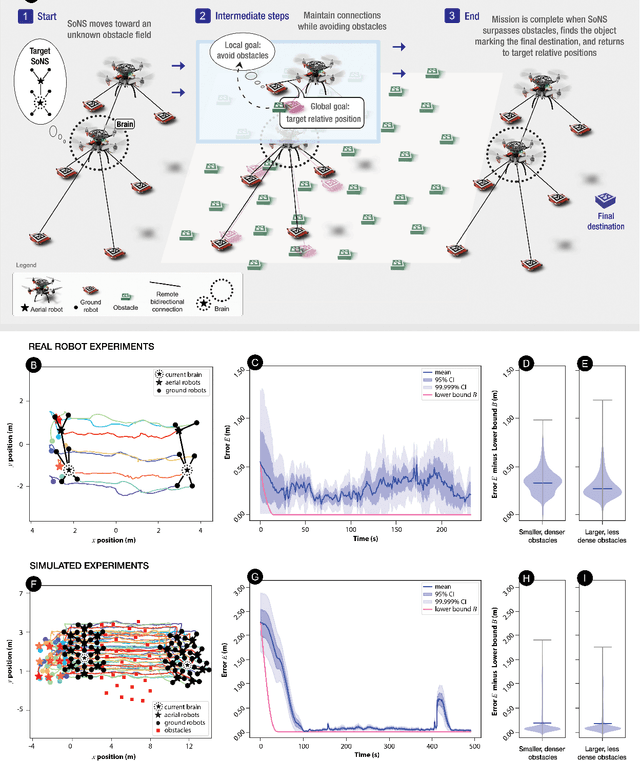
The system architecture controlling a group of robots is generally set before deployment and can be either centralized or decentralized. This dichotomy is highly constraining, because decentralized systems are typically fully self-organized and therefore difficult to design analytically, whereas centralized systems have single points of failure and limited scalability. To address this dichotomy, we present the Self-organizing Nervous System (SoNS), a novel robot swarm architecture based on self-organized hierarchy. The SoNS approach enables robots to autonomously establish, maintain, and reconfigure dynamic multi-level system architectures. For example, a robot swarm consisting of $n$ independent robots could transform into a single $n$-robot SoNS and then into several independent smaller SoNSs, where each SoNS uses a temporary and dynamic hierarchy. Leveraging the SoNS approach, we show that sensing, actuation, and decision-making can be coordinated in a locally centralized way, without sacrificing the benefits of scalability, flexibility, and fault tolerance, for which swarm robotics is usually studied. In several proof-of-concept robot missions -- including binary decision-making and search-and-rescue -- we demonstrate that the capabilities of the SoNS approach greatly advance the state of the art in swarm robotics. The missions are conducted with a real heterogeneous aerial-ground robot swarm, using a custom-developed quadrotor platform. We also demonstrate the scalability of the SoNS approach in swarms of up to 250 robots in a physics-based simulator, and demonstrate several types of system fault tolerance in simulation and reality.
Long-Term Rate-Fairness-Aware Beamforming Based Massive MIMO Systems
Dec 09, 2023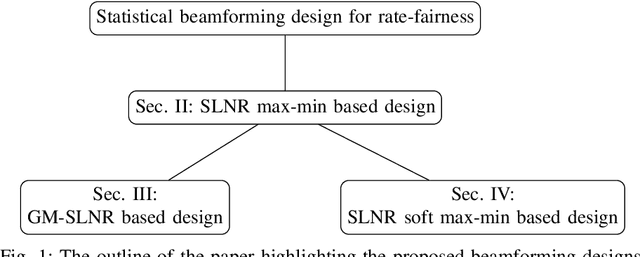
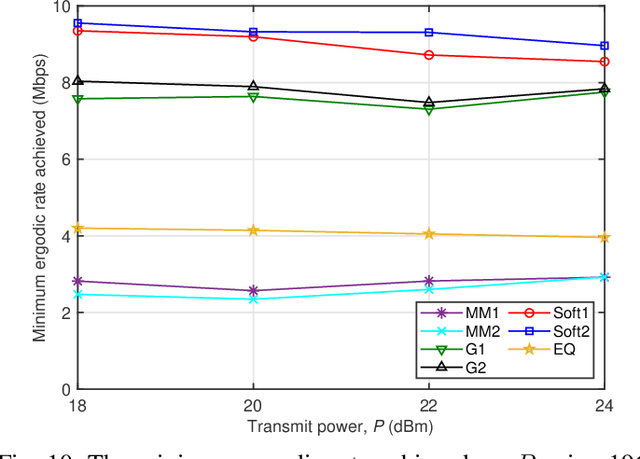
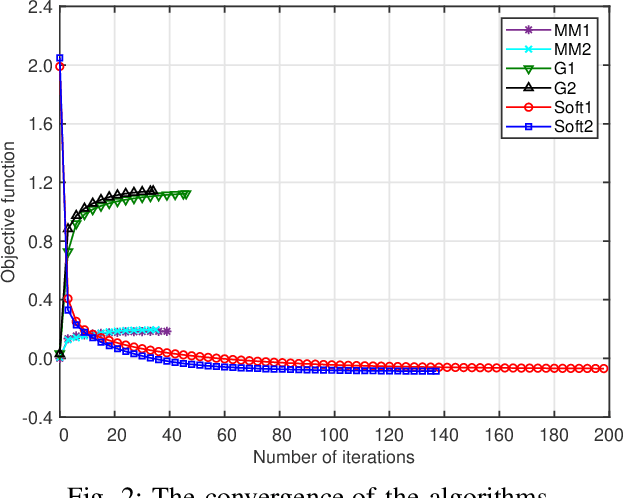
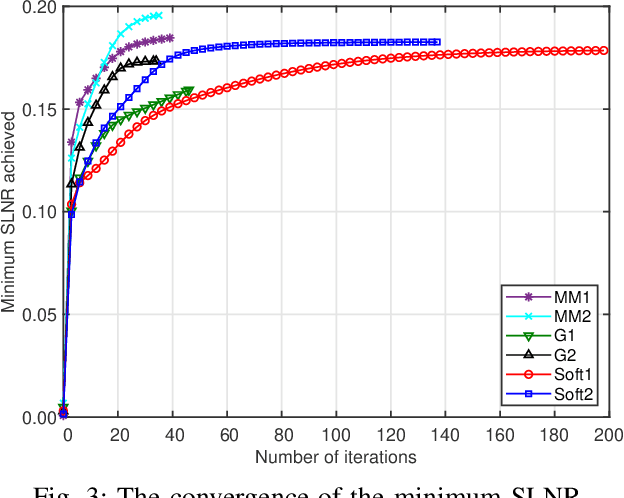
This is the first treatise on multi-user (MU) beamforming designed for achieving long-term rate-fairness in fulldimensional MU massive multi-input multi-output (m-MIMO) systems. Explicitly, based on the channel covariances, which can be assumed to be known beforehand, we address this problem by optimizing the following objective functions: the users' signal-toleakage-noise ratios (SLNRs) using SLNR max-min optimization, geometric mean of SLNRs (GM-SLNR) based optimization, and SLNR soft max-min optimization. We develop a convex-solver based algorithm, which invokes a convex subproblem of cubic time-complexity at each iteration for solving the SLNR maxmin problem. We then develop closed-form expression based algorithms of scalable complexity for the solution of the GMSLNR and of the SLNR soft max-min problem. The simulations provided confirm the users' improved-fairness ergodic rate distributions.
Max-min Rate Optimization of Low-Complexity Hybrid Multi-User Beamforming Maintaining Rate-Fairness
Oct 26, 2023



A wireless network serving multiple users in the millimeter-wave or the sub-terahertz band by a base station is considered. High-throughput multi-user hybrid-transmit beamforming is conceived by maximizing the minimum rate of the users. For the sake of energy-efficient signal transmission, the array-of-subarrays structure is used for analog beamforming relying on low-resolution phase shifters. We develop a convexsolver based algorithm, which iteratively invokes a convex problem of the same beamformer size for its solution. We then introduce the soft max-min rate objective function and develop a scalable algorithm for its optimization. Our simulation results demonstrate the striking fact that soft max-min rate optimization not only approaches the minimum user rate obtained by max-min rate optimization but it also achieves a sum rate similar to that of sum-rate maximization. Thus, the soft max-min rate optimization based beamforming design conceived offers a new technique of simultaneously achieving a high individual quality-of-service for all users and a high total network throughput.
Low-Complexity Pareto-Optimal 3D Beamforming for the Full-Dimensional Multi-User Massive MIMO Downlink
Feb 18, 2023



Full-dimensional (FD) multi-user massive multiple input multiple output (m-MIMO) systems employ large two-dimensional (2D) rectangular antenna arrays to control both the azimuth and elevation angles of signal transmission. We introduce the sum of two outer products of the azimuth and elevation beamforming vectors having moderate dimensions as a new class of FD beamforming. We show that this low-complexity class is capable of outperforming 2D beamforming relying on the single outer product of the azimuth and elevation beamforming vectors. It is also capable of performing close to its FD counterpart of massive dimensions in terms of either the users minimum rate or their geometric mean rate (GM-rate), or sum rate (SR). Furthermore, we also show that even FD beamforming may be outperformed by our outer product-based improper Gaussian signaling solution. Explicitly, our design is based on low-complexity algorithms relying on convex problems of moderate dimensions for max-min rate optimization or on closed-form expressions for GM-rate and SR maximization.
A New Class of Structured Beamforming for Content-Centric Fog Radio Access Networks
Aug 14, 2021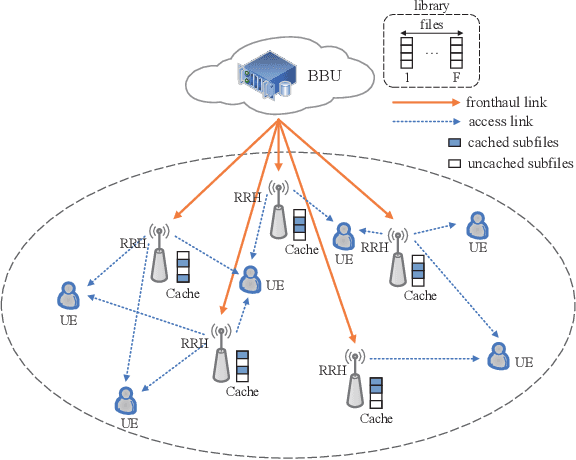
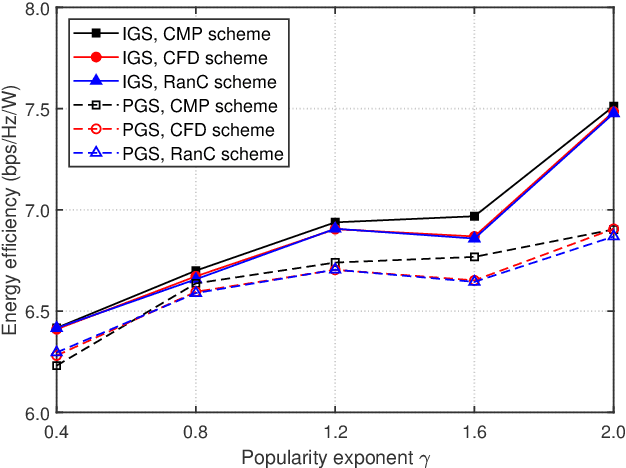
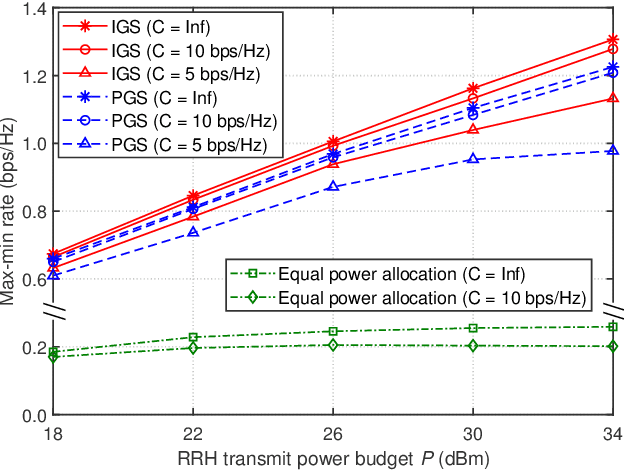
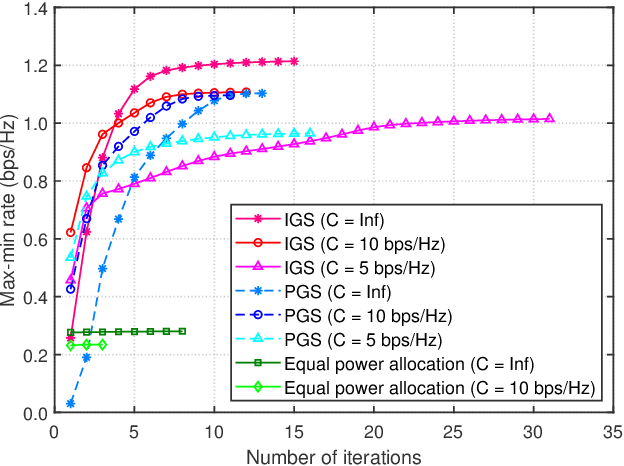
A multi-user fog radio access network (F-RAN) is designed for supporting content-centric services. The requested contents are partitioned into sub-contents, which are then 'beam- formed' by the remote radio heads (RRHs) for transmission to the users. Since a large number of beamformers must be designed, this poses a computational challenge. We tackle this challenge by proposing a new class of regularized zero forcing beamforming (RZFB) for directly mitigating the inter-content interferences, while the 'intra-content interference' is mitigated by successive interference cancellation at the user end. Thus each beamformer is decided by a single real variable (for proper Gaus- sian signaling) or by a pair of complex variables (for improper Gaussian signaling). Hence the total number of decision variables is substantially reduced to facilitate tractable computation. To address the problem of energy efficiency optimization subject to multiple constraints, such as individual user-rate requirement and the fronthauling constraint of the links between the RRHs and the centralized baseband signal processing unit, as well as the total transmit power budget, we develop low-complexity path- following algorithms. Finally, we actualize their performance by simulations.
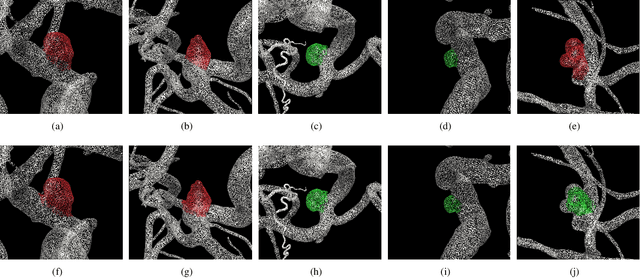
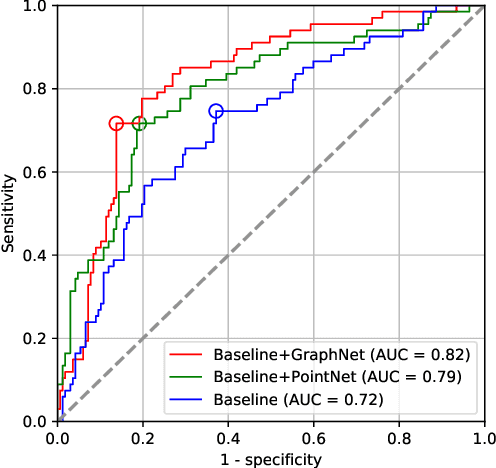
Detecting intracranial aneurysm rupture from 3D surfaces using a novel GraphNet approach
Oct 17, 2019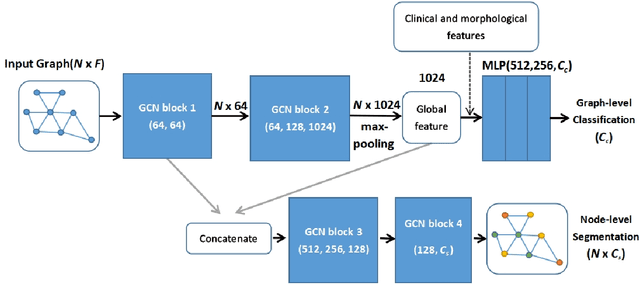
Intracranial aneurysm (IA) is a life-threatening blood spot in human's brain if it ruptures and causes cerebral hemorrhage. It is challenging to detect whether an IA has ruptured from medical images. In this paper, we propose a novel graph based neural network named GraphNet to detect IA rupture from 3D surface data. GraphNet is based on graph convolution network (GCN) and is designed for graph-level classification and node-level segmentation. The network uses GCN blocks to extract surface local features and pools to global features. 1250 patient data including 385 ruptured and 865 unruptured IAs were collected from clinic for experiments. The performance on randomly selected 234 test patient data was reported. The experiment with the proposed GraphNet achieved accuracy of 0.82, area-under-curve (AUC) of receiver operating characteristic (ROC) curve 0.82 in the classification task, significantly outperforming the baseline approach without using graph based networks. The segmentation output of the model achieved mean graph-node-based dice coefficient (DSC) score 0.88.