 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Sampling Strategies for Implicit 3D Reconstruction
Apr 11, 2023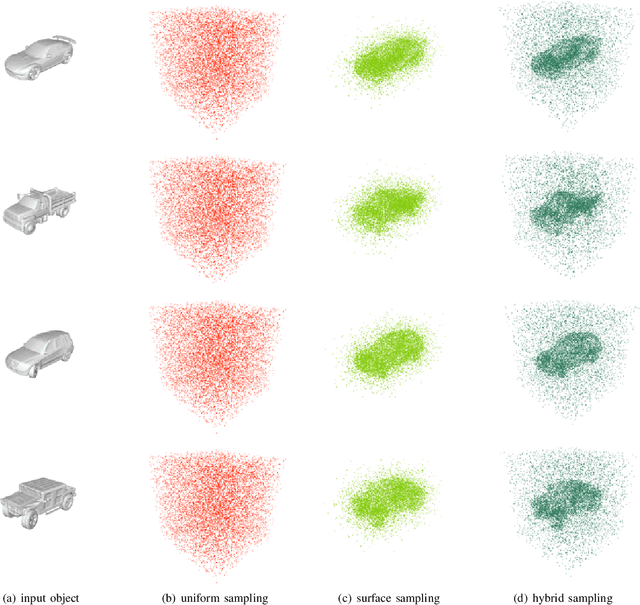
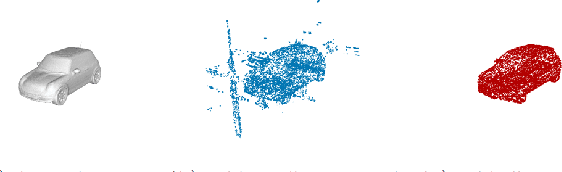

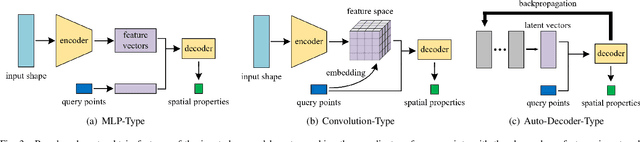
In the training process of the implicit 3D reconstruction network, the choice of spatial query points' sampling strategy affects the final performance of the model. Different works have differences in the selection of sampling strategies, not only in the spatial distribution of query points but also in the order of magnitude difference in the density of query points. For how to select the sampling strategy of query points, current works are more akin to an enumerating operation to find the optimal solution, which seriously affects work efficiency. In this work, we explored the relationship between sampling strategy and network final performance through classification analysis and experimental comparison from three aspects: the relationship between network type and sampling strategy, the relationship between implicit function and sampling strategy, and the impact of sampling density on model performance. In addition, we also proposed two methods, linear sampling and distance mask, to improve the sampling strategy of query points, making it more general and robust.
GlassNet: Label Decoupling-based Three-stream Neural Network for Robust Image Glass Detection
Aug 25, 2021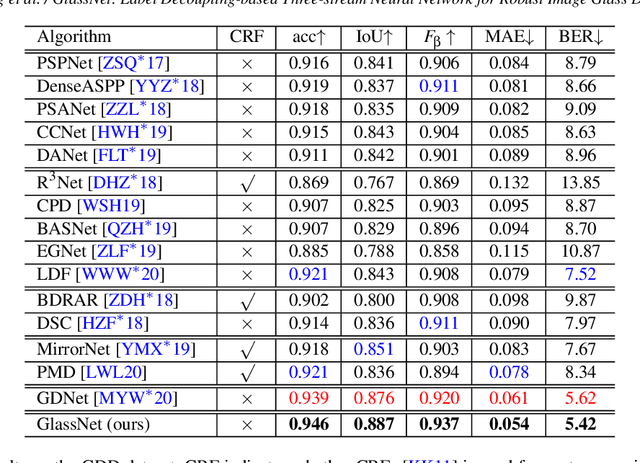
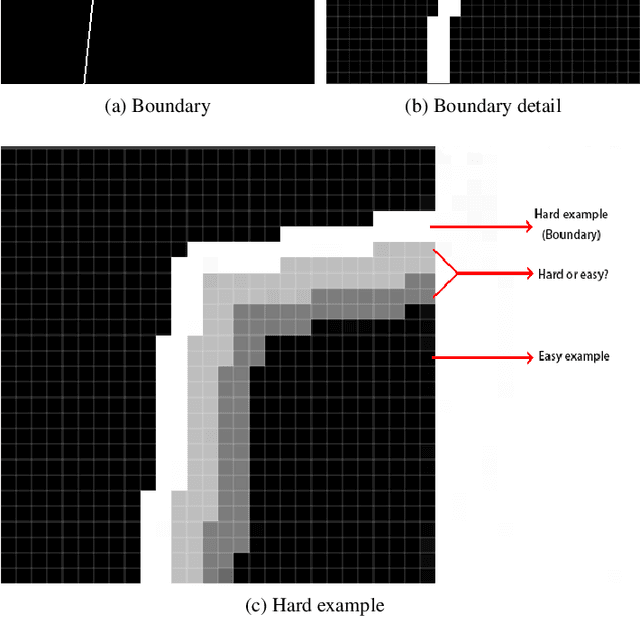
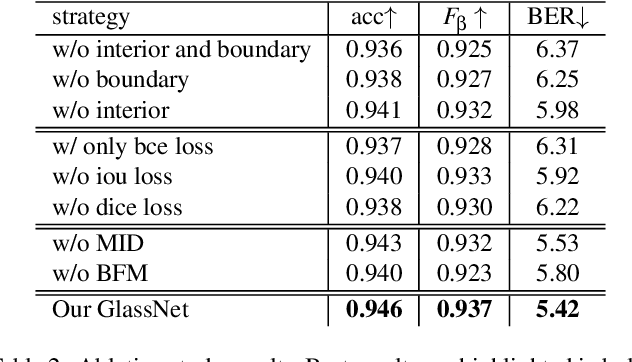
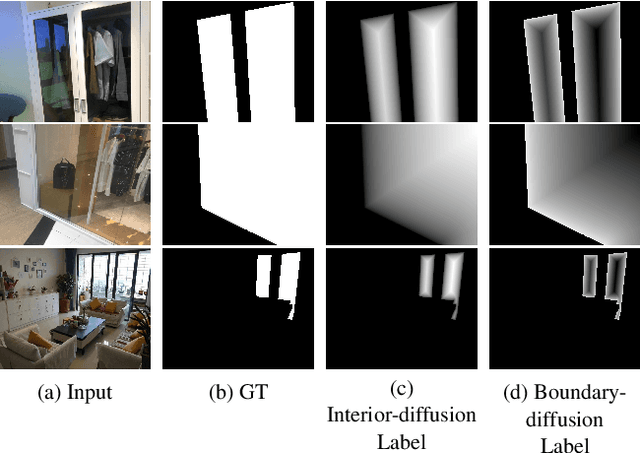
Most of the existing object detection methods generate poor glass detection results, due to the fact that the transparent glass shares the same appearance with arbitrary objects behind it in an image. Different from traditional deep learning-based wisdoms that simply use the object boundary as auxiliary supervision, we exploit label decoupling to decompose the original labeled ground-truth (GT) map into an interior-diffusion map and a boundary-diffusion map. The GT map in collaboration with the two newly generated maps breaks the imbalanced distribution of the object boundary, leading to improved glass detection quality. We have three key contributions to solve the transparent glass detection problem: (1) We propose a three-stream neural network (call GlassNet for short) to fully absorb beneficial features in the three maps. (2) We design a multi-scale interactive dilation module to explore a wider range of contextual information. (3) We develop an attention-based boundary-aware feature Mosaic module to integrate multi-modal information. Extensive experiments on the benchmark dataset exhibit clear improvements of our method over SOTAs, in terms of both the overall glass detection accuracy and boundary clearness.
Control of Flying Robotic Insects: A Perspective and Unifying Approach
Oct 25, 2019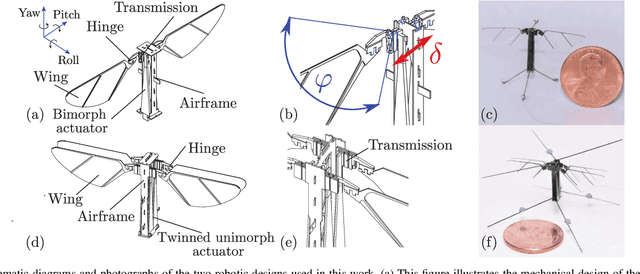
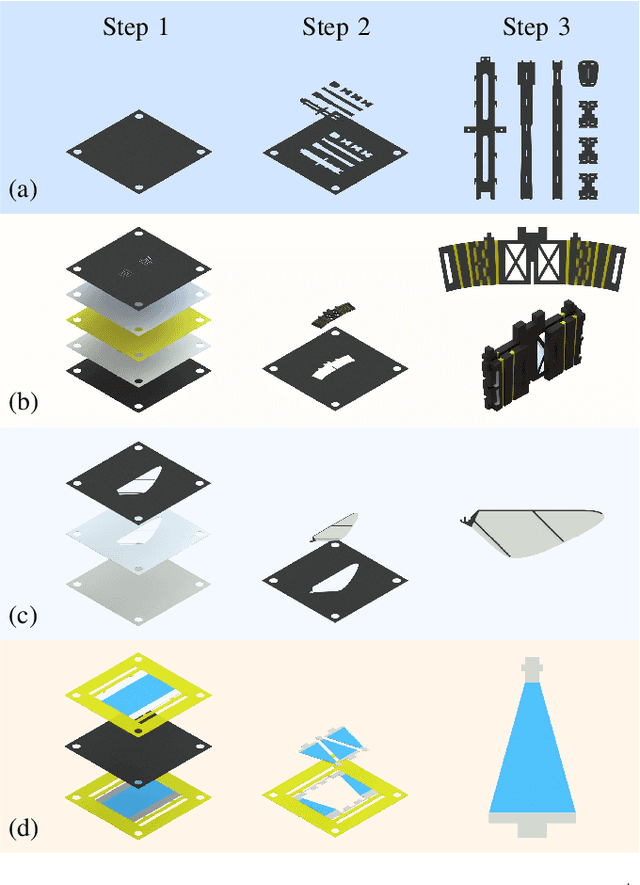
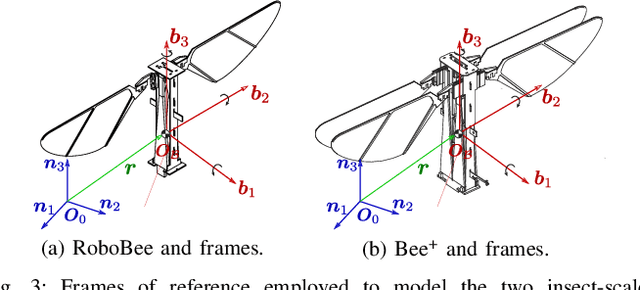
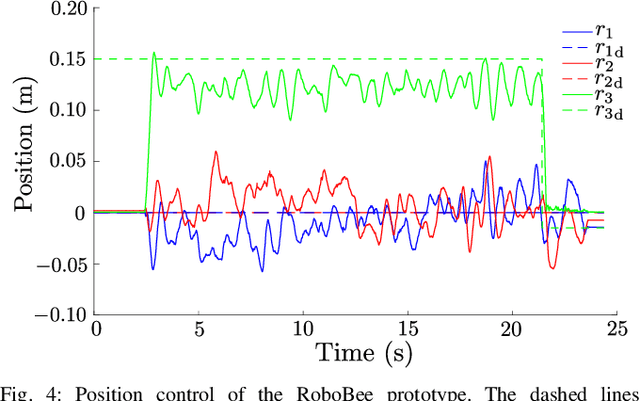
We discuss the problem of designing and implementing controllers for insect-scale flapping-wing micro air vehicles (FWMAVs), from a unifying perspective and employing two different experimental platforms; namely, a Harvard RoboBee-like two-winged robot and the four-winged USC Bee+. Through experiments, we demonstrate that a method that employs quaternion coordinates for attitude control, developed to control quadrotors, can be applied to drive both robotic insects considered in this work. The proposed notion that a generic strategy can be used to control several types of artificial insects with some common characteristics was preliminarily tested and validated using a set of experiments, which include position- and attitude-controlled flights. We believe that the presented results are interesting and valuable from both the research and educational perspectives.
Detecting intracranial aneurysm rupture from 3D surfaces using a novel GraphNet approach
Oct 17, 2019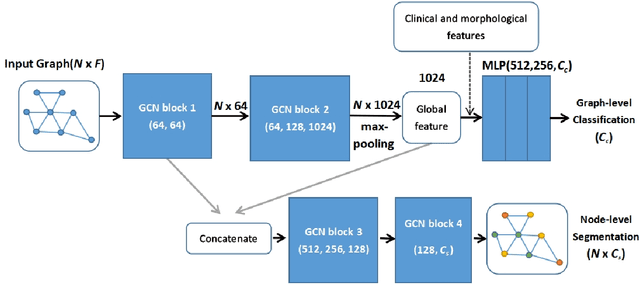
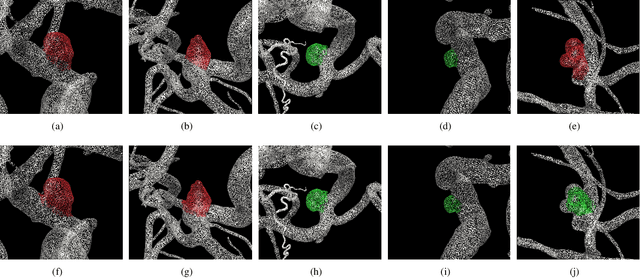
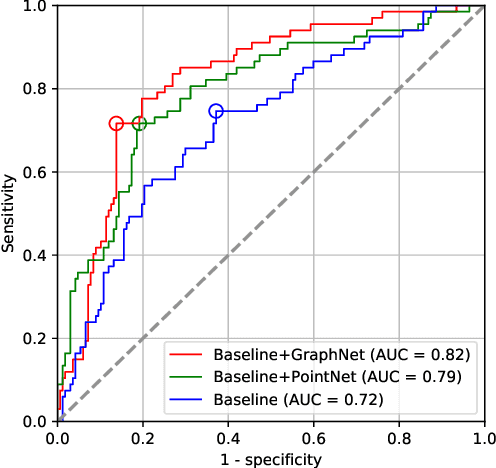
Intracranial aneurysm (IA) is a life-threatening blood spot in human's brain if it ruptures and causes cerebral hemorrhage. It is challenging to detect whether an IA has ruptured from medical images. In this paper, we propose a novel graph based neural network named GraphNet to detect IA rupture from 3D surface data. GraphNet is based on graph convolution network (GCN) and is designed for graph-level classification and node-level segmentation. The network uses GCN blocks to extract surface local features and pools to global features. 1250 patient data including 385 ruptured and 865 unruptured IAs were collected from clinic for experiments. The performance on randomly selected 234 test patient data was reported. The experiment with the proposed GraphNet achieved accuracy of 0.82, area-under-curve (AUC) of receiver operating characteristic (ROC) curve 0.82 in the classification task, significantly outperforming the baseline approach without using graph based networks. The segmentation output of the model achieved mean graph-node-based dice coefficient (DSC) score 0.88.