 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of Flying Robotic Insects: A Perspective and Unifying Approach
Oct 25, 2019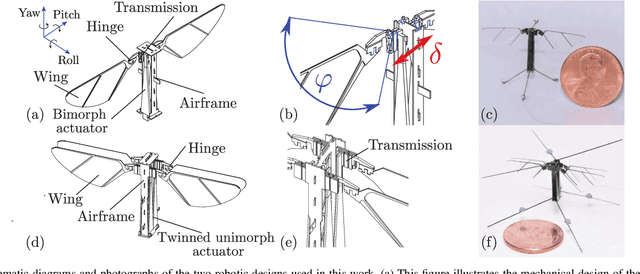
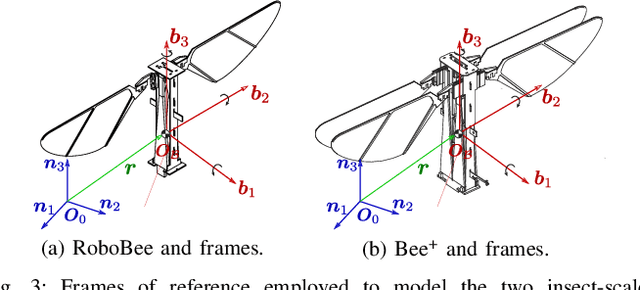
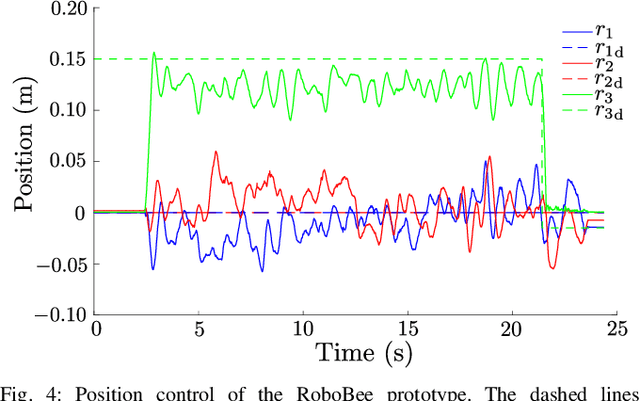
We discuss the problem of designing and implementing controllers for insect-scale flapping-wing micro air vehicles (FWMAVs), from a unifying perspective and employing two different experimental platforms; namely, a Harvard RoboBee-like two-winged robot and the four-winged USC Bee+. Through experiments, we demonstrate that a method that employs quaternion coordinates for attitude control, developed to control quadrotors, can be applied to drive both robotic insects considered in this work. The proposed notion that a generic strategy can be used to control several types of artificial insects with some common characteristics was preliminarily tested and validated using a set of experiments, which include position- and attitude-controlled flights. We believe that the presented results are interesting and valuable from both the research and educational perspectives.
Optimized Hidden Markov Model based on Constrained Particle Swarm Optimization
Nov 07, 2018As one of Bayesian analysis tools, Hidden Markov Model (HMM) has been used to in extensive applications. Most HMMs are solved by Baum-Welch algorithm (BWHMM) to predict the model parameters, which is difficult to find global optimal solutions. This paper proposes an optimized Hidden Markov Model with Particle Swarm Optimization (PSO) algorithm and so is called PSOHMM. In order to overcome the statistical constraints in HMM, the paper develops re-normalization and re-mapping mechanisms to ensure the constraints in HMM. The experiments have shown that PSOHMM can search better solution than BWHMM, and has faster convergence speed.