 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-organizing Nervous Systems for Robot Swarms
Jan 23, 2024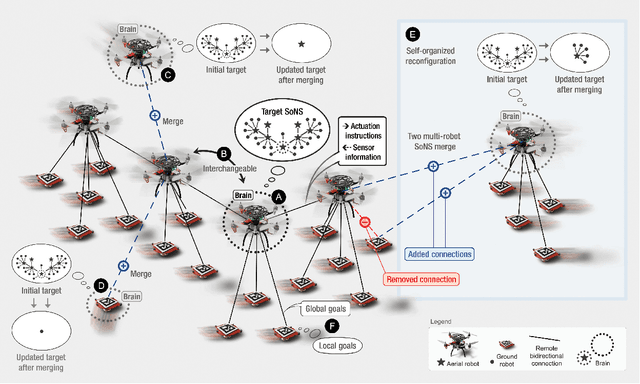
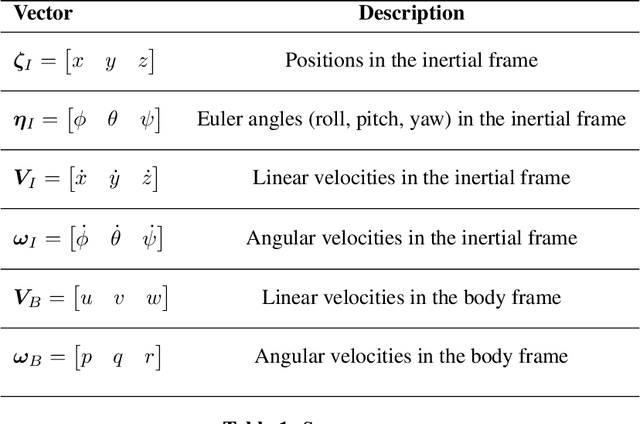

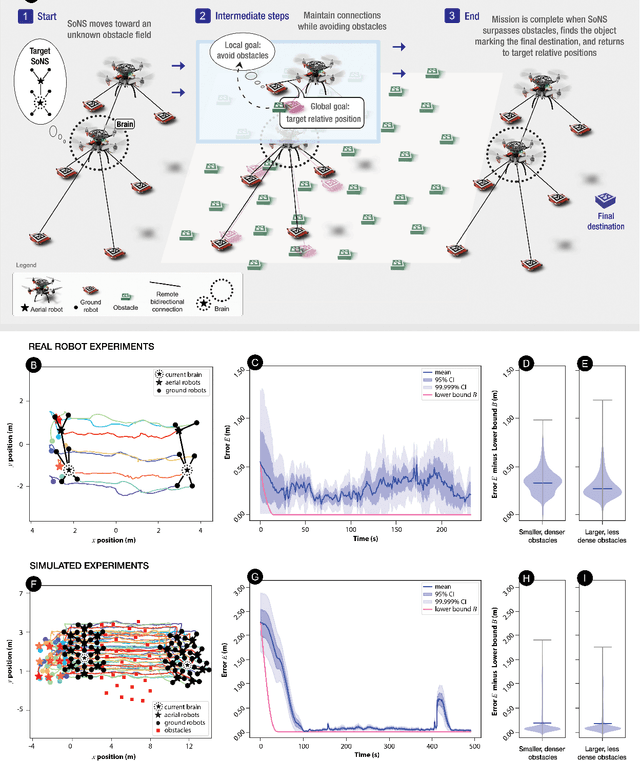
The system architecture controlling a group of robots is generally set before deployment and can be either centralized or decentralized. This dichotomy is highly constraining, because decentralized systems are typically fully self-organized and therefore difficult to design analytically, whereas centralized systems have single points of failure and limited scalability. To address this dichotomy, we present the Self-organizing Nervous System (SoNS), a novel robot swarm architecture based on self-organized hierarchy. The SoNS approach enables robots to autonomously establish, maintain, and reconfigure dynamic multi-level system architectures. For example, a robot swarm consisting of $n$ independent robots could transform into a single $n$-robot SoNS and then into several independent smaller SoNSs, where each SoNS uses a temporary and dynamic hierarchy. Leveraging the SoNS approach, we show that sensing, actuation, and decision-making can be coordinated in a locally centralized way, without sacrificing the benefits of scalability, flexibility, and fault tolerance, for which swarm robotics is usually studied. In several proof-of-concept robot missions -- including binary decision-making and search-and-rescue -- we demonstrate that the capabilities of the SoNS approach greatly advance the state of the art in swarm robotics. The missions are conducted with a real heterogeneous aerial-ground robot swarm, using a custom-developed quadrotor platform. We also demonstrate the scalability of the SoNS approach in swarms of up to 250 robots in a physics-based simulator, and demonstrate several types of system fault tolerance in simulation and reality.
AntNet: Distributed Stigmergetic Control for Communications Networks
May 27, 2011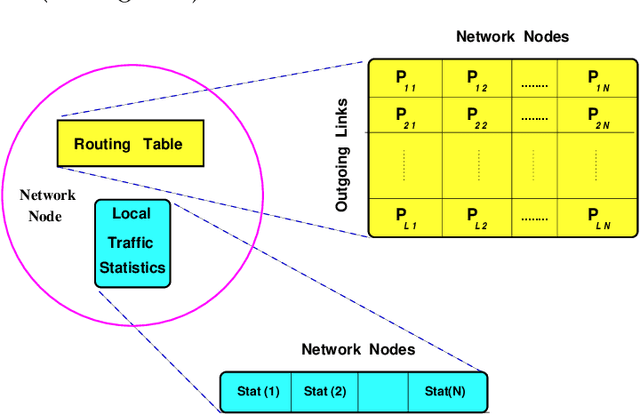

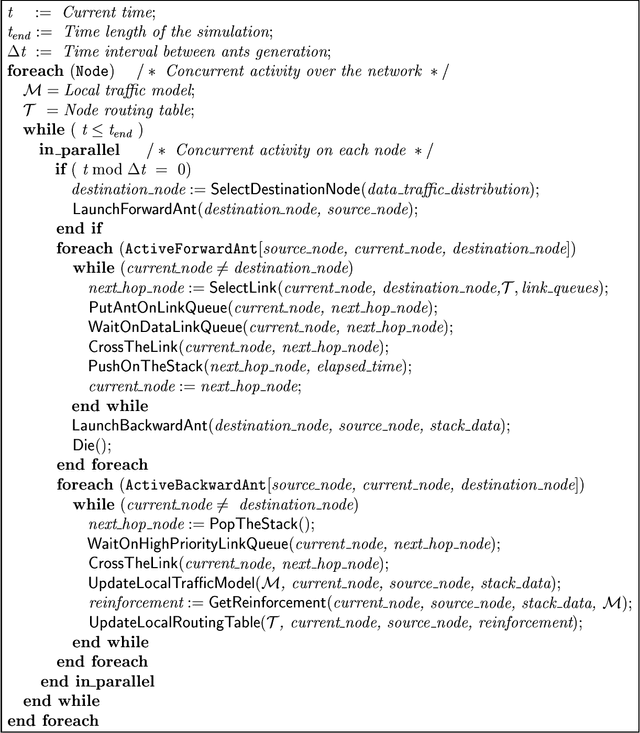
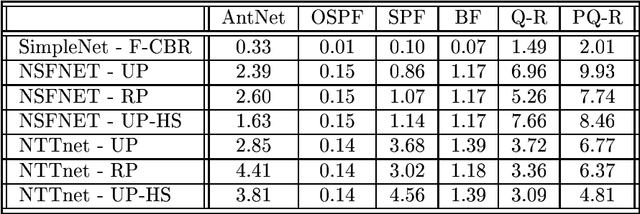
This paper introduces AntNet, a novel approach to the adaptive learning of routing tables in communications networks. AntNet is a distributed, mobile agents based Monte Carlo system that was inspired by recent work on the ant colony metaphor for solving optimization problems. AntNet's agents concurrently explore the network and exchange collected information. The communication among the agents is indirect and asynchronous, mediated by the network itself. This form of communication is typical of social insects and is called stigmergy. We compare our algorithm with six state-of-the-art routing algorithms coming from the telecommunications and machine learning fields. The algorithms' performance is evaluated over a set of realistic testbeds. We run many experiments over real and artificial IP datagram networks with increasing number of nodes and under several paradigmatic spatial and temporal traffic distributions. Results are very encouraging. AntNet showed superior performance under all the experimental conditions with respect to its competitors. We analyze the main characteristics of the algorithm and try to explain the reasons for its superiority.