 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-in-the-Loop Pareto Optimization: Trade-off Characterization for Assist-as-Needed Training and Performance Evaluation
Mar 24, 2026During human motor skill training and physical rehabilitation, there is an inherent trade-off between task difficulty and user performance. Characterizing this trade-off is crucial for evaluating user performance, designing assist-as-needed (AAN) protocols, and assessing the efficacy of training protocols. In this study, we propose a novel human-in-the-loop (HiL) Pareto optimization approach to characterize the trade-off between task performance and the perceived challenge level of motor learning or rehabilitation tasks. We adapt Bayesian multi-criteria optimization to systematically and efficiently perform HiL Pareto characterizations. Our HiL optimization employs a hybrid model that measures performance with a quantitative metric, while the perceived challenge level is captured with a qualitative metric. We demonstrate the feasibility of the proposed HiL Pareto characterization through a user study. Furthermore, we present the utility of the framework through three use cases in the context of a manual skill training task with haptic feedback. First, we demonstrate how the characterized trade-off can be used to design a sample AAN training protocol for a motor learning task and to evaluate the group-level efficacy of the proposed AAN protocol relative to a baseline adaptive assistance protocol. Second, we demonstrate that individual-level comparisons of the trade-offs characterized before and after the training session enable fair evaluation of training progress under different assistance levels. This evaluation method is more general than standard performance evaluations, as it can provide insights even when users cannot perform the task without assistance. Third, we show that the characterized trade-offs also enable fair performance comparisons among different users, as they capture the best possible performance of each user under all feasible assistance levels.
Passive Realizations of Series Elastic Actuation: Passivity and Effects of Plant and Controller Dynamics on Haptic Rendering Performance
Sep 06, 2022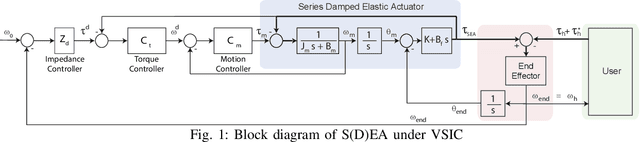
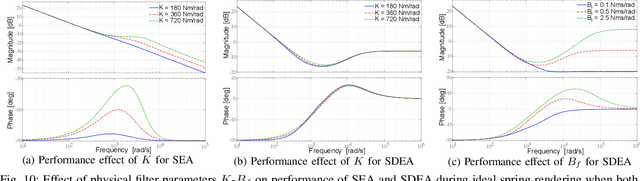
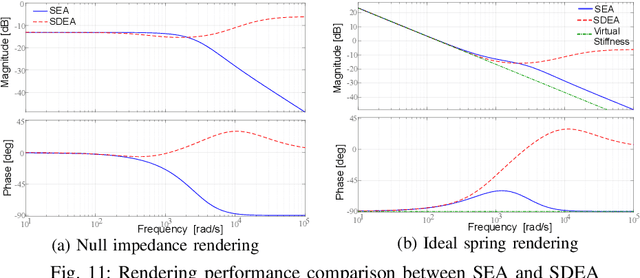
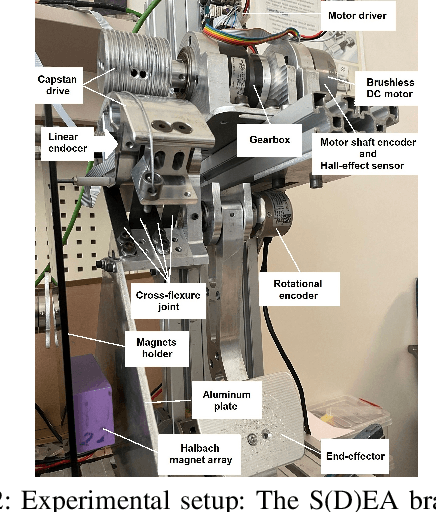
We establish the necessary and sufficient conditions for the frequency domain passivity of series (damped) elastic actuation (S(D)EA) while rendering null impedance and ideal springs under velocity sourced impedance control (VSIC). We introduce passive physical equivalents for S(D)EA under closed-loop control to help establish an intuitive understanding of the passivity bounds and to highlight the effect of different plant parameters and controller gains on the closed-loop performance of the system. Through the passive physical equivalents, we rigorously compare the effect of different plants dynamics (e.g., SEA and SDEA) and different cascaded controller architectures (e.g., P-P and P-PI) on the system performance. We show that passive physical equivalents establish a natural means for effective impedance analysis. We provide experimental validations of our theoretical results and evaluate the haptic rendering performance of S(D)EA under VSIC.
Simulation-based multi-criteria comparison of mono-articular and bi-articular exoskeletons during walking with and without load
Sep 30, 2021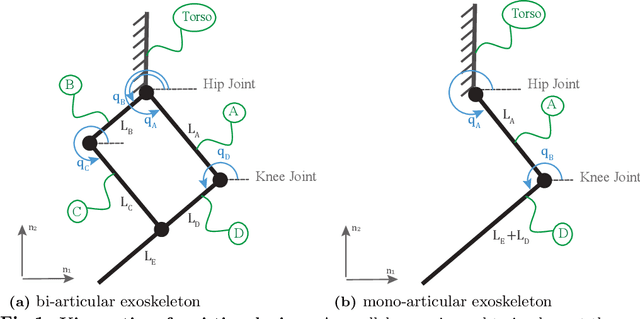

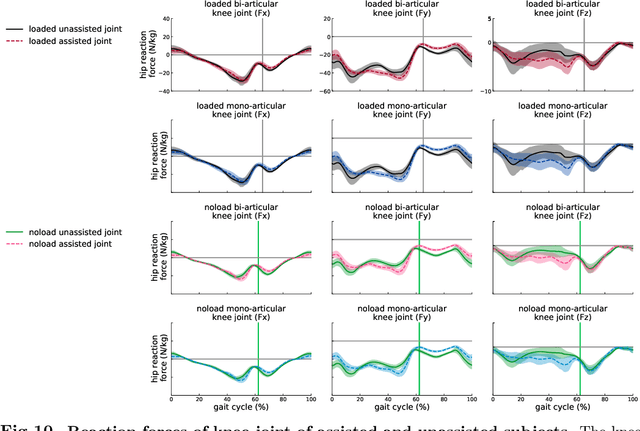

Developing exoskeletons that can reduce the metabolic cost of assisted subjects is challenging since a systematic design approach is required to capture the effects of device dynamics and the assistance torques on human performance. Design studies that rely on musculoskeletal models hold high promise in providing effective design guidelines, as the effect of various devices and different assistance torque profiles on metabolic cost can be studied systematically. In this paper, we present a simulation-based multi-criteria design approach to systematically study the effect of different device kinematics and corresponding optimal assistive torque profiles under actuator saturation on the metabolic cost, muscle activation, and joint reaction forces of subjects walking under different loading conditions. For the multi-criteria comparison of exoskeletons, we introduce a Pareto optimization approach to simultaneously optimize the exoskeleton power consumption and the human metabolic rate reduction during walking, under different loading conditions. We further superpose the effects of device inertia and electrical regeneration on the metabolic rate and power consumption, respectively. Our results explain the effects of heavy loads on the optimal assistance profiles of the exoskeletons and provide guidelines on choosing optimal device configurations under actuator torque limitations, device inertia, and regeneration effects. The multi-criteria comparison of devices indicates that despite the similar assistance levels of both devices, mono-articular exoskeletons show better performance on reducing the peak reaction forces, while the power consumption of bi-articular devices is less sensitive to the loading. Furthermore, for the bi-articular exoskeletons, the device inertia has lower detrimental effects on the metabolic cost of subjects and does not affect the Pareto-optimality of solutions.
Stability and Transparency in Series Elastic Actuation: A Two-Port Analysis
Nov 02, 2020



Series Elastic Actuation (SEA) is a widely-used approach for interaction control, as it enables high fidelity and robust force control, improving the safety of physical human-robot interaction (pHRI). In the design of pHRI systems, safety is an imperative design criterion that limits interaction performance, since there exists a fundamental trade-off between the stability robustness and rendering performance. The safety of interaction necessitates coupled stability to ensure the closed-loop stability of a pHRI system when coupled to a wide range of unknown operators and environments. The frequency-domain passivity framework provides powerful analysis tools to study the coupled stability of linear time-invariant systems. In the literature, coupled stability of one-port models of SEA has been studied for various controllers while rendering certain basic environments, and the necessary and sufficient conditions for such passive terminations have been derived. In this study, we extend the one-port passivity analyzes provided in the literature and provide the necessary and sufficient condition for two-port passivity of SEA under velocity-sourced impedance control. Based on the newly established conditions, we derive non-conservative passivity bounds for a virtual coupler. We also prove the need for a physical damping term in parallel to the series elastic element to ensure two-port passivity, even when a virtual coupler is present. Finally, we validate our theoretical results through numerical simulations and by reproducing one-port passivity results as special cases of our results that correspond to appropriate one-port terminations.
Dynamic Multi-Agent Path Finding based on Conflict Resolution using Answer Set Programming
Sep 22, 2020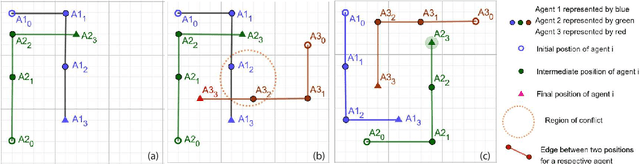
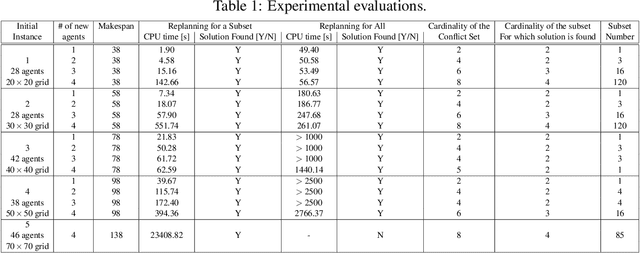

We study a dynamic version of multi-agent path finding problem (called D-MAPF) where existing agents may leave and new agents may join the team at different times. We introduce a new method to solve D-MAPF based on conflict-resolution. The idea is, when a set of new agents joins the team and there are conflicts, instead of replanning for the whole team, to replan only for a minimal subset of agents whose plans conflict with each other. We utilize answer set programming as part of our method for planning, replanning and identifying minimal set of conflicts.
* In Proceedings ICLP 2020, arXiv:2009.09158
Human Robot Collaborative Assembly Planning: An Answer Set Programming Approach
Aug 08, 2020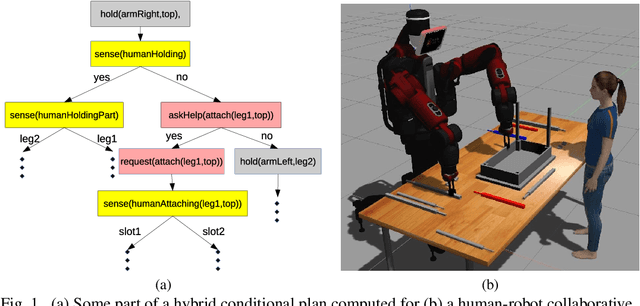

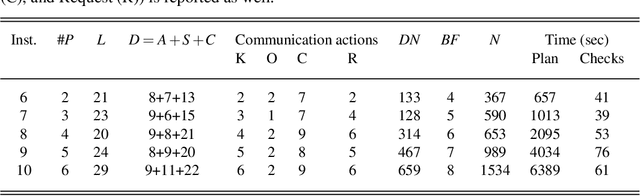
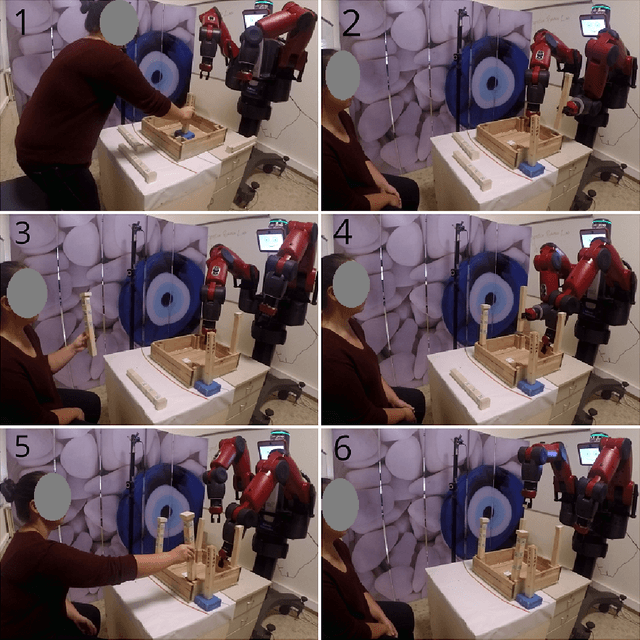
For planning an assembly of a product from a given set of parts, robots necessitate certain cognitive skills: high-level planning is needed to decide the order of actuation actions, while geometric reasoning is needed to check the feasibility of these actions. For collaborative assembly tasks with humans, robots require further cognitive capabilities, such as commonsense reasoning, sensing, and communication skills, not only to cope with the uncertainty caused by incomplete knowledge about the humans' behaviors but also to ensure safer collaborations. We propose a novel method for collaborative assembly planning under uncertainty, that utilizes hybrid conditional planning extended with commonsense reasoning and a rich set of communication actions for collaborative tasks. Our method is based on answer set programming. We show the applicability of our approach in a real-world assembly domain, where a bi-manual Baxter robot collaborates with a human teammate to assemble furniture. This manuscript is under consideration for acceptance in TPLP.
A Computational Multi-Criteria Optimization Approach to Controller Design for Physical Human-Robot Interaction
Jun 19, 2020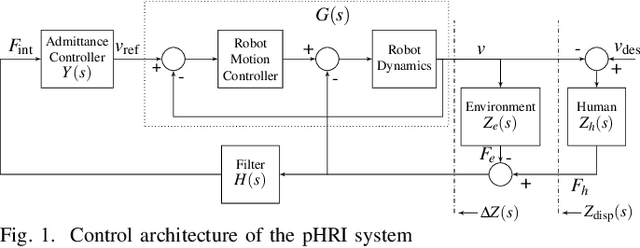
Physical human-robot interaction (pHRI) integrates the benefits of human operator and a collaborative robot in tasks involving physical interaction, with the aim of increasing the task performance. However, the design of interaction controllers that achieve safe and transparent operations is challenging, mainly due to the contradicting nature of these objectives. Knowing that attaining perfect transparency is practically unachievable, controllers that allow better compromise between these objectives are desirable. In this paper, we propose a multi-criteria optimization framework, which jointly optimizes the stability robustness and transparency of a closed-loop pHRI system for a given interaction controller. In particular, we propose a Pareto optimization framework that allows the designer to make informed decisions by thoroughly studying the trade-off between stability robustness and transparency. The proposed framework involves a search over the discretized controller parameter space to compute the Pareto front curve and a selection of controller parameters that yield maximum attainable transparency and stability robustness by studying this trade-off curve. The proposed framework not only leads to the design of an optimal controller, but also enables a fair comparison among different interaction controllers. In order to demonstrate the practical use of the proposed approach, integer and fractional order admittance controllers are studied as a case study and compared both analytically and experimentally. The experimental results validate the proposed design framework and show that the achievable transparency under fractional order admittance controller is higher than that of integer order one, when both controllers are designed to ensure the same level of stability robustness.
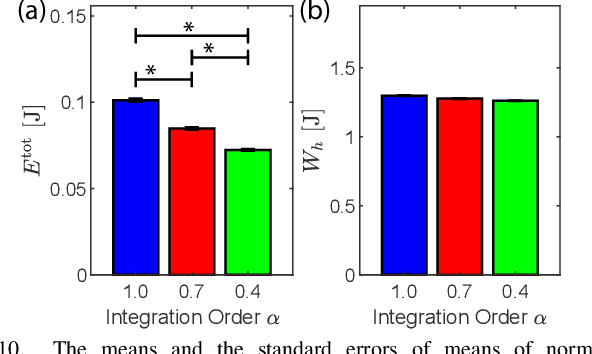
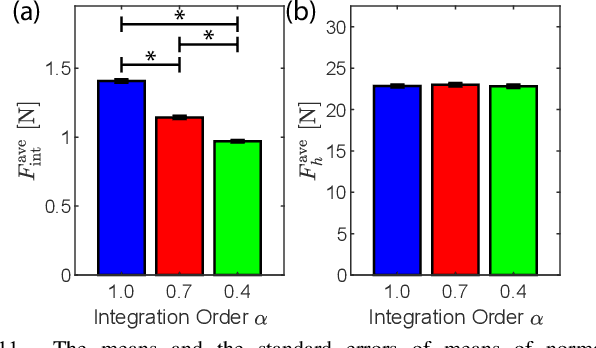
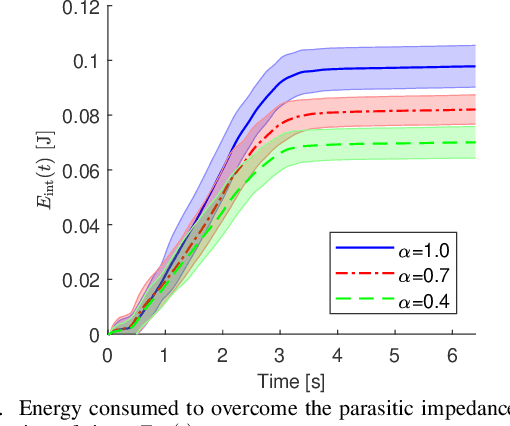
Design, Implementation and Evaluation of a Variable Stiffness Transradial Hand Prosthesis
Oct 28, 2019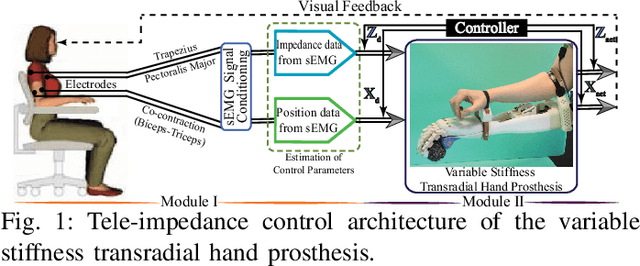



We present the design, implementation, and experimental evaluation of a low-cost, customizable, easy-to-use transradial hand prosthesis capable of adapting its compliance. Variable stiffness actuation (VSA) of the prosthesis is based on antagonistically arranged tendons coupled to nonlinear springs driven through a Bowden cable-based power transmission. Bowden cable-based antagonistic VSA can, not only regulate the stiffness and the position of the prosthetic hand, but also enables a light-weight and low-cost design, by opportunistic placement of motors, batteries and controllers on any convenient location on the human body, while nonlinear springs are conveniently integrated inside the forearm. The transradial hand prosthesis also features tendon driven underactuated compliant fingers that allow natural adaption of the hand shape to wrap around a wide variety of object geometries, while the modulation of the stiffness of their drive tendons enables the prosthesis to perform various tasks with high dexterity. The compliant fingers of the prosthesis add inherent robustness and flexibility, even under impacts. The control of the variable stiffness transradial hand prosthesis is achieved by an sEMG based natural human-machine interface.
Efficacy of Haptic Pedal Feel Compensation on Driving with Regenerative Braking
Oct 06, 2019


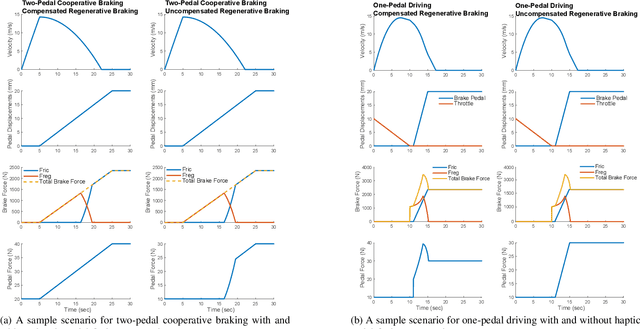
We study the efficacy of haptic pedal feel compensation on driving safety and performance during regenerative braking. In particular, we evaluate the effectiveness of the preservation of the natural brake pedal feel under two-pedal cooperative braking and one-pedal driving scenarios, through human subject experiments in a simulated vehicle pursuit task. The experimental results indicate that pedal feel compensation can significantly decrease the hard braking instances, improving safety for both two-pedal cooperative braking and one-pedal driving. Volunteers also strongly prefer compensation, while they equally prefer and can effectively utilize both two-pedal and one-pedal driving conditions. Furthermore, the beneficial effects of haptic pedal feel compensation is larger for the two-pedal cooperative braking case.
Object Placement on Cluttered Surfaces: A Nested Local Search Approach
Jun 20, 2019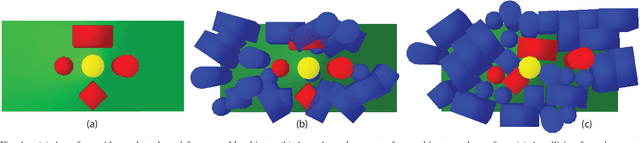
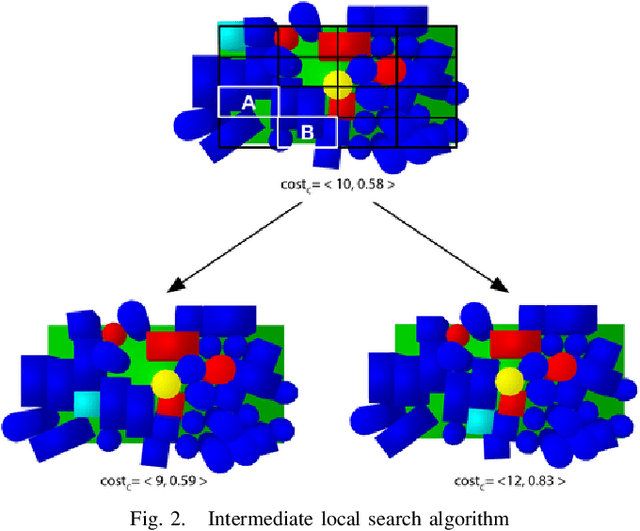
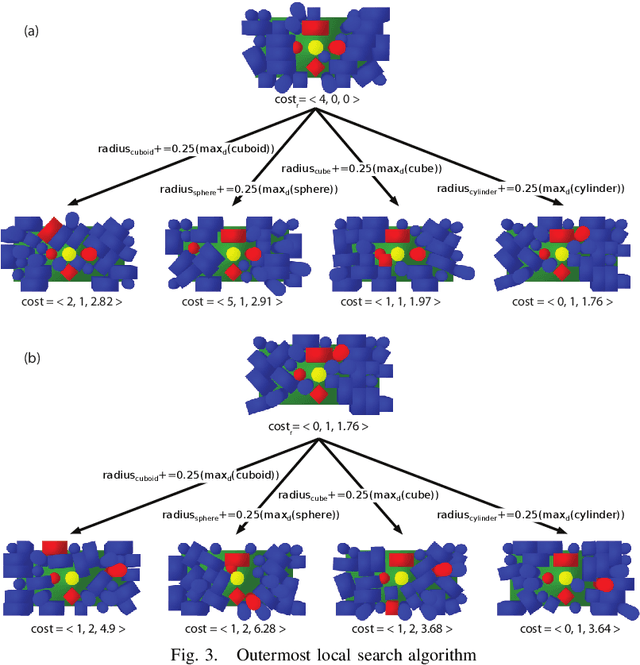
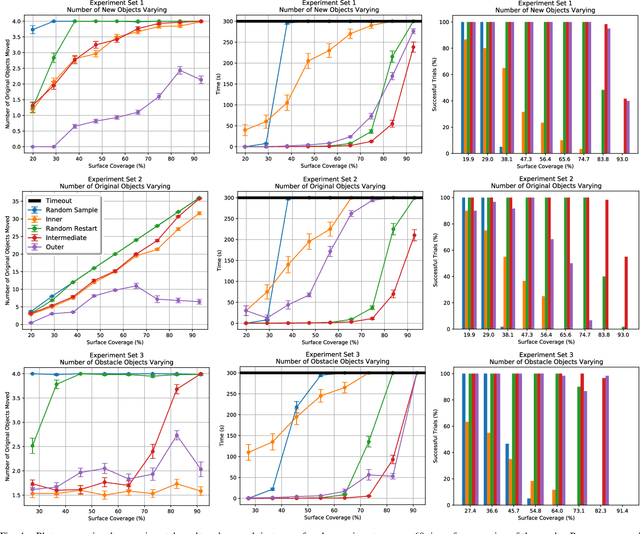
For planning rearrangements of objects in a clutter, it is required to know the goal configuration of the objects. However, in real life scenarios, this information is not available most of the time. We introduce a novel method that computes a collision-free placement of objects on a cluttered surface, while minimizing the total number and amount of displacements of the existing moveable objects. Our method applies nested local searches that perform multi-objective optimizations guided by heuristics. Experimental evaluations demonstrate high computational efficiency and success rate of our method, as well as good quality of solutions.