 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based multi-criteria comparison of mono-articular and bi-articular exoskeletons during walking with and without load
Paper and Code
Sep 30, 2021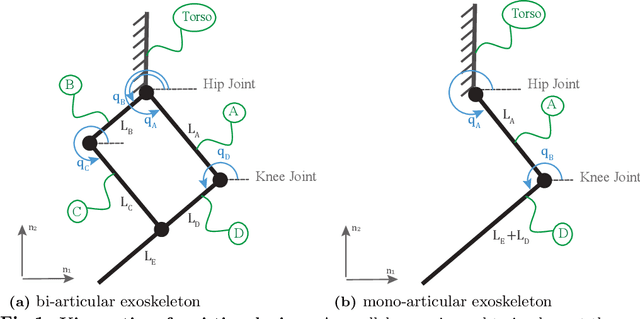

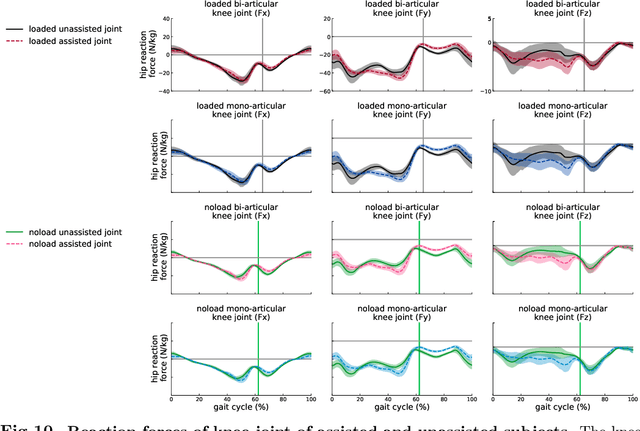

Developing exoskeletons that can reduce the metabolic cost of assisted subjects is challenging since a systematic design approach is required to capture the effects of device dynamics and the assistance torques on human performance. Design studies that rely on musculoskeletal models hold high promise in providing effective design guidelines, as the effect of various devices and different assistance torque profiles on metabolic cost can be studied systematically. In this paper, we present a simulation-based multi-criteria design approach to systematically study the effect of different device kinematics and corresponding optimal assistive torque profiles under actuator saturation on the metabolic cost, muscle activation, and joint reaction forces of subjects walking under different loading conditions. For the multi-criteria comparison of exoskeletons, we introduce a Pareto optimization approach to simultaneously optimize the exoskeleton power consumption and the human metabolic rate reduction during walking, under different loading conditions. We further superpose the effects of device inertia and electrical regeneration on the metabolic rate and power consumption, respectively. Our results explain the effects of heavy loads on the optimal assistance profiles of the exoskeletons and provide guidelines on choosing optimal device configurations under actuator torque limitations, device inertia, and regeneration effects. The multi-criteria comparison of devices indicates that despite the similar assistance levels of both devices, mono-articular exoskeletons show better performance on reducing the peak reaction forces, while the power consumption of bi-articular devices is less sensitive to the loading. Furthermore, for the bi-articular exoskeletons, the device inertia has lower detrimental effects on the metabolic cost of subjects and does not affect the Pareto-optimality of solutions.