 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 3-DOF Robotic Platform for the Rehabilitation of Reaction Time and Balance Skills of MS Patients
Sep 27, 2021

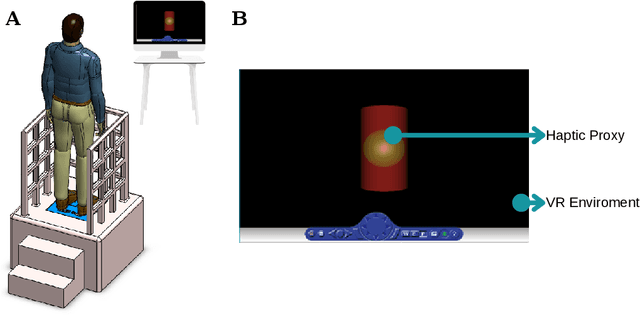
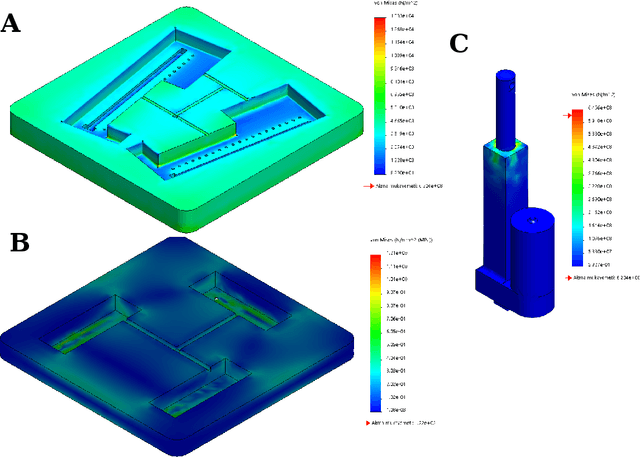
We present the design, implementation, and experimental evaluation of a 3 DOF robotic platform to treat the balance disorder of the patients with MS. The robotic platform is designed to allow angular motion of the ankle based on the anthropomorphic freedom in the space. That being said, such a robot forces patients to keep their balance by changing the angular position of the platform in three directions. The difficulty level of the tasks are determined based on the data gathered from the upper and lower platforms responsible for patients' reaction time against the unexpected perturbations. The upper platform instantaneously provides pressure distribution of each foot, whereas the lower platform simultaneously shares the center of mass of the patient. In this study, the kinematic and dynamic analyses, and simulation of the 3 DOF parallel manipulator is successfully implemented. The control of the proof of concept design is carried out by means of PID control. The working principle of the upper and lower platforms are verified by set of experiments.
Design, Implementation and Evaluation of a Variable Stiffness Transradial Hand Prosthesis
Oct 28, 2019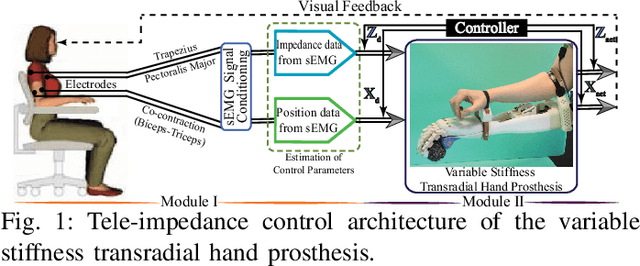



We present the design, implementation, and experimental evaluation of a low-cost, customizable, easy-to-use transradial hand prosthesis capable of adapting its compliance. Variable stiffness actuation (VSA) of the prosthesis is based on antagonistically arranged tendons coupled to nonlinear springs driven through a Bowden cable-based power transmission. Bowden cable-based antagonistic VSA can, not only regulate the stiffness and the position of the prosthetic hand, but also enables a light-weight and low-cost design, by opportunistic placement of motors, batteries and controllers on any convenient location on the human body, while nonlinear springs are conveniently integrated inside the forearm. The transradial hand prosthesis also features tendon driven underactuated compliant fingers that allow natural adaption of the hand shape to wrap around a wide variety of object geometries, while the modulation of the stiffness of their drive tendons enables the prosthesis to perform various tasks with high dexterity. The compliant fingers of the prosthesis add inherent robustness and flexibility, even under impacts. The control of the variable stiffness transradial hand prosthesis is achieved by an sEMG based natural human-machine interface.