 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClimate Model Driven Seasonal Forecasting Approach with Deep Learning
Feb 21, 2023Understanding seasonal climatic conditions is critical for better management of resources such as water, energy and agriculture. Recently, there has been a great interest in utilizing the power of artificial intelligence methods in climate studies. This paper presents a cutting-edge deep learning model (UNet++) trained by state-of-the-art global CMIP6 models to forecast global temperatures a month ahead using the ERA5 reanalysis dataset. ERA5 dataset was also used for finetuning as well performance analysis in the validation dataset. Three different setups (CMIP6; CMIP6 + elevation; CMIP6 + elevation + ERA5 finetuning) were used with both UNet and UNet++ algorithms resulting in six different models. For each model 14 different sequential and non-sequential temporal settings were used. The Mean Absolute Error (MAE) analysis revealed that UNet++ with CMIP6 with elevation and ERA5 finetuning model with "Year 3 Month 2" temporal case provided the best outcome with an MAE of 0.7. Regression analysis over the validation dataset between the ERA5 data values and the corresponding AI model predictions revealed slope and $R^2$ values close to 1 suggesting a very good agreement. The AI model predicts significantly better than the mean CMIP6 ensemble between 2016 and 2021. Both models predict the summer months more accurately than the winter months.
Robot-Assisted Drilling on Curved Surfaces with Haptic Guidance under Adaptive Admittance Control
Jul 28, 2022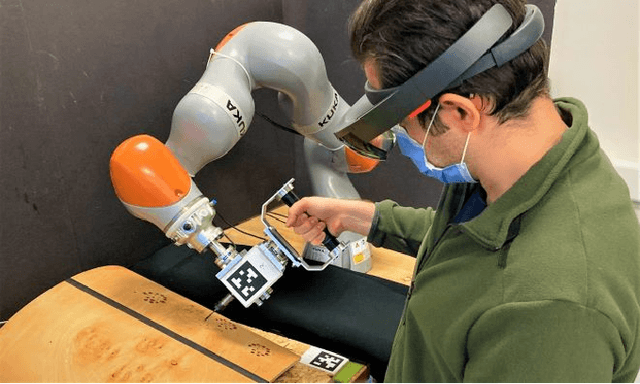
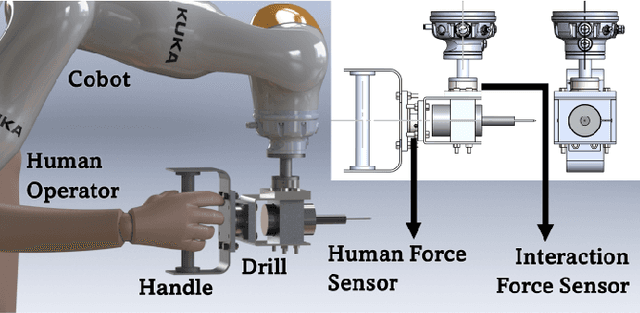
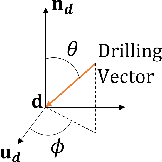
Drilling a hole on a curved surface with a desired angle is prone to failure when done manually, due to the difficulties in drill alignment and also inherent instabilities of the task, potentially causing injury and fatigue to the workers. On the other hand, it can be impractical to fully automate such a task in real manufacturing environments because the parts arriving at an assembly line can have various complex shapes where drill point locations are not easily accessible, making automated path planning difficult. In this work, an adaptive admittance controller with 6 degrees of freedom is developed and deployed on a KUKA LBR iiwa 7 cobot such that the operator is able to manipulate a drill mounted on the robot with one hand comfortably and open holes on a curved surface with haptic guidance of the cobot and visual guidance provided through an AR interface. Real-time adaptation of the admittance damping provides more transparency when driving the robot in free space while ensuring stability during drilling. After the user brings the drill sufficiently close to the drill target and roughly aligns to the desired drilling angle, the haptic guidance module fine tunes the alignment first and then constrains the user movement to the drilling axis only, after which the operator simply pushes the drill into the workpiece with minimal effort. Two sets of experiments were conducted to investigate the potential benefits of the haptic guidance module quantitatively (Experiment I) and also the practical value of the proposed pHRI system for real manufacturing settings based on the subjective opinion of the participants (Experiment II).
An adaptive admittance controller for collaborative drilling with a robot based on subtask classification via deep learning
May 31, 2022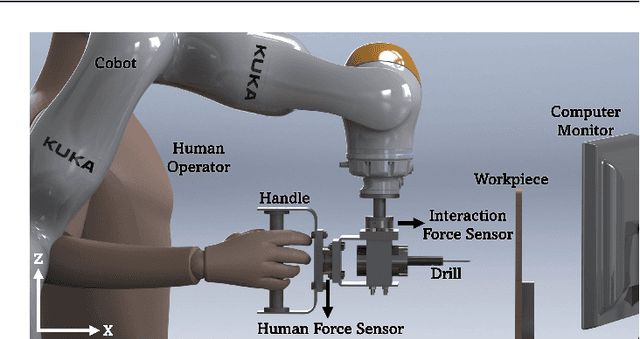
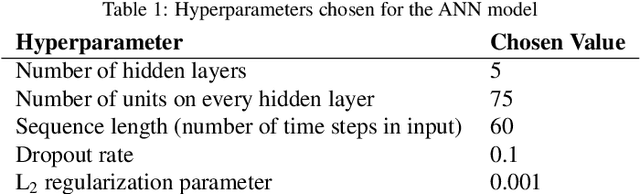
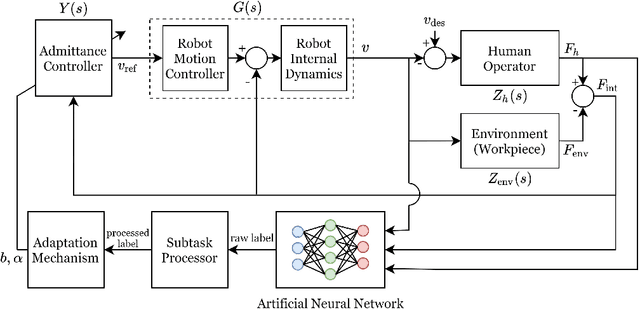
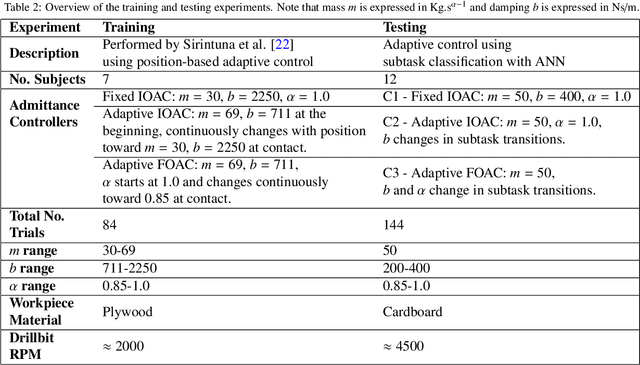
In this paper, we propose a supervised learning approach based on an Artificial Neural Network (ANN) model for real-time classification of subtasks in a physical human-robot interaction (pHRI) task involving contact with a stiff environment. In this regard, we consider three subtasks for a given pHRI task: Idle, Driving, and Contact. Based on this classification, the parameters of an admittance controller that regulates the interaction between human and robot are adjusted adaptively in real time to make the robot more transparent to the operator (i.e. less resistant) during the Driving phase and more stable during the Contact phase. The Idle phase is primarily used to detect the initiation of task. Experimental results have shown that the ANN model can learn to detect the subtasks under different admittance controller conditions with an accuracy of 98% for 12 participants. Finally, we show that the admittance adaptation based on the proposed subtask classifier leads to 20% lower human effort (i.e. higher transparency) in the Driving phase and 25% lower oscillation amplitude (i.e. higher stability) during drilling in the Contact phase compared to an admittance controller with fixed parameters.
Towards Collaborative Drilling with a Cobot Using Admittance Controller
Jul 28, 2020


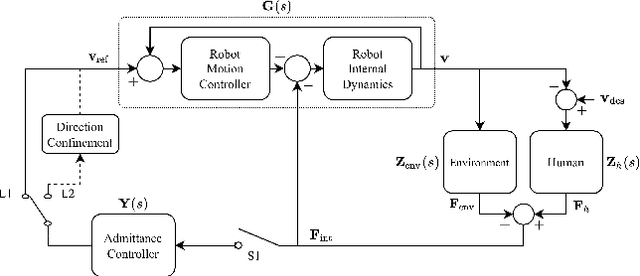
In the near future, collaborative robots (cobots) are expected to play a vital role in the manufacturing and automation sectors. It is predicted that workers will work side by side in collaboration with cobots to surpass fully automated factories. In this regard, physical human-robot interaction (pHRI) aims to develop natural communication between the partners to bring speed, flexibility, and ergonomics to the execution of complex manufacturing tasks. One challenge in pHRI is to design an optimal interaction controller to balance the limitations introduced by the contradicting nature of transparency and stability requirements. In this paper, a general methodology to design an admittance controller for a pHRI system is developed by considering the stability and transparency objectives. In our approach, collaborative robot constrains the movement of human operator to help with a pHRI task while an augmented reality (AR) interface informs the operator about its phases. To this end, dynamical characterization of the collaborative robot (LBR IIWA 7 R800, KUKA Inc.) is presented first. Then, the stability and transparency analyses for our pHRI task involving collaborative drilling with this robot are reported. A range of allowable parameters for the admittance controller is determined by superimposing the stability and transparency graphs. Finally, three different sets of parameters are selected from the allowable range and the effect of admittance controllers utilizing these parameter sets on the task performance is investigated.
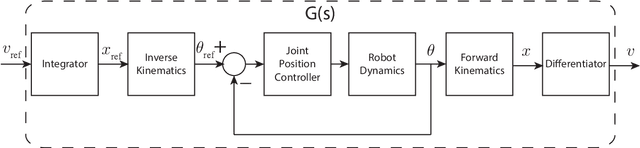
A Computational Multi-Criteria Optimization Approach to Controller Design for Physical Human-Robot Interaction
Jun 19, 2020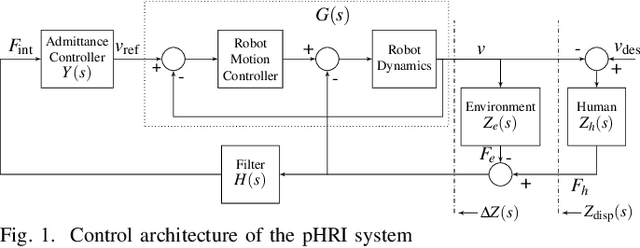
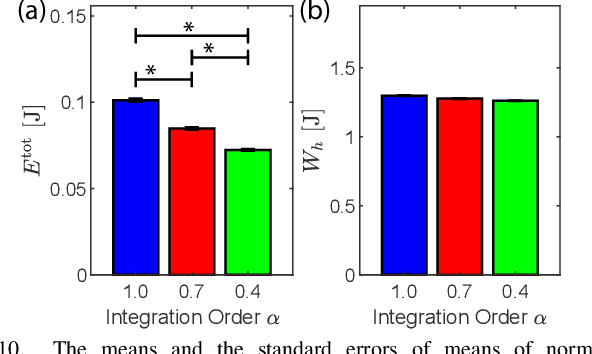
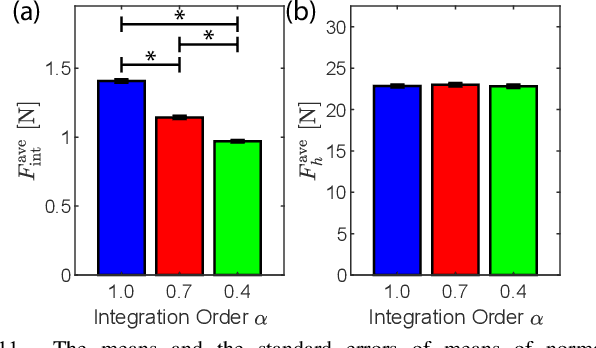
Physical human-robot interaction (pHRI) integrates the benefits of human operator and a collaborative robot in tasks involving physical interaction, with the aim of increasing the task performance. However, the design of interaction controllers that achieve safe and transparent operations is challenging, mainly due to the contradicting nature of these objectives. Knowing that attaining perfect transparency is practically unachievable, controllers that allow better compromise between these objectives are desirable. In this paper, we propose a multi-criteria optimization framework, which jointly optimizes the stability robustness and transparency of a closed-loop pHRI system for a given interaction controller. In particular, we propose a Pareto optimization framework that allows the designer to make informed decisions by thoroughly studying the trade-off between stability robustness and transparency. The proposed framework involves a search over the discretized controller parameter space to compute the Pareto front curve and a selection of controller parameters that yield maximum attainable transparency and stability robustness by studying this trade-off curve. The proposed framework not only leads to the design of an optimal controller, but also enables a fair comparison among different interaction controllers. In order to demonstrate the practical use of the proposed approach, integer and fractional order admittance controllers are studied as a case study and compared both analytically and experimentally. The experimental results validate the proposed design framework and show that the achievable transparency under fractional order admittance controller is higher than that of integer order one, when both controllers are designed to ensure the same level of stability robustness.