 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOstrichRL: A Musculoskeletal Ostrich Simulation to Study Bio-mechanical Locomotion
Dec 11, 2021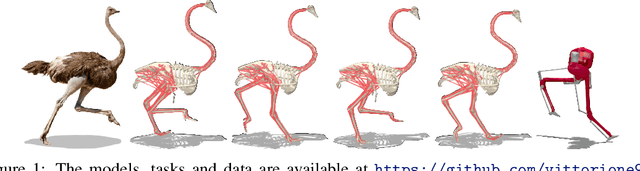
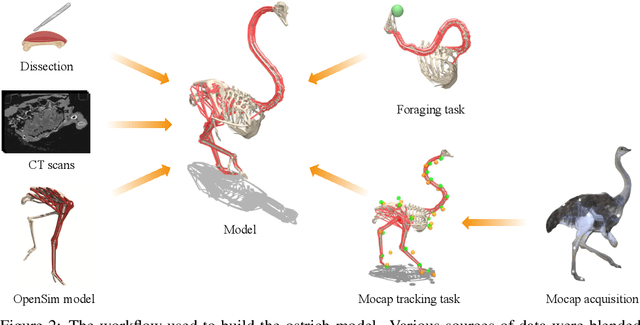
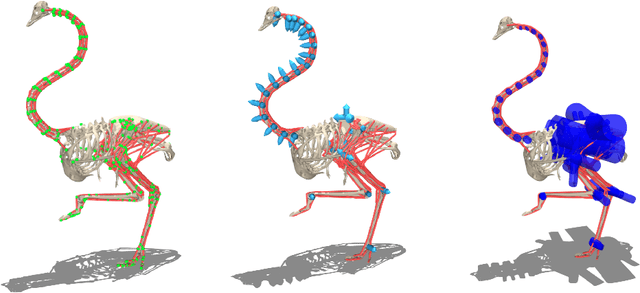
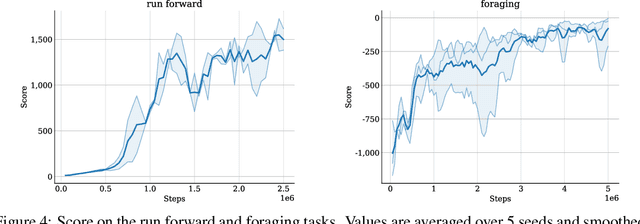
Muscle-actuated control is a research topic of interest spanning different fields, in particular biomechanics, robotics and graphics. This type of control is particularly challenging because models are often overactuated, and dynamics are delayed and non-linear. It is however a very well tested and tuned actuation model that has undergone millions of years of evolution and that involves interesting properties exploiting passive forces of muscle-tendon units and efficient energy storage and release. To facilitate research on muscle-actuated simulation, we release a 3D musculoskeletal simulation of an ostrich based on the MuJoCo simulator. Ostriches are one of the fastest bipeds on earth and are therefore an excellent model for studying muscle-actuated bipedal locomotion. The model is based on CT scans and dissections used to gather actual muscle data such as insertion sites, lengths and pennation angles. Along with this model, we also provide a set of reinforcement learning tasks, including reference motion tracking and a reaching task with the neck. The reference motion data are based on motion capture clips of various behaviors which we pre-processed and adapted to our model. This paper describes how the model was built and iteratively improved using the tasks. We evaluate the accuracy of the muscle actuation patterns by comparing them to experimentally collected electromyographic data from locomoting birds. We believe that this work can be a useful bridge between the biomechanics, reinforcement learning, graphics and robotics communities, by providing a fast and easy to use simulation.
POINTCLEANNET: Learning to Denoise and Remove Outliers from Dense Point Clouds
Jan 04, 2019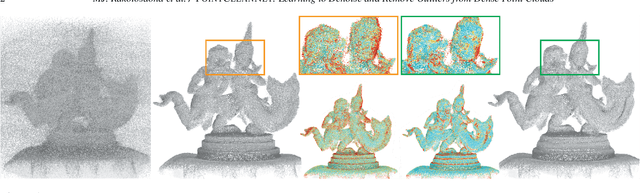
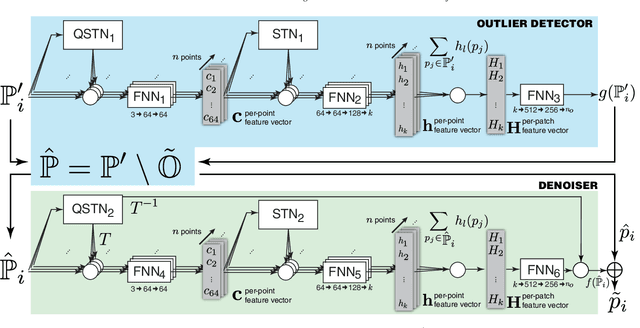
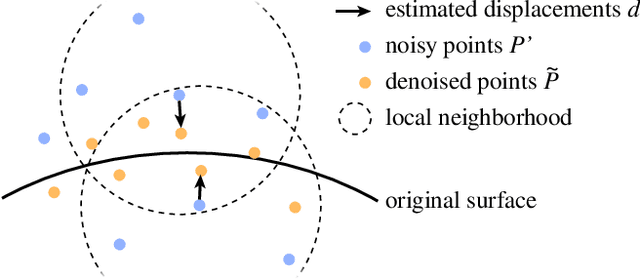
Point clouds obtained with 3D scanners or by image-based reconstruction techniques are often corrupted with significant amount of noise and outliers. Traditional methods for point cloud denoising largely rely on local surface fitting (e.g., jets or MLS surfaces), local or non-local averaging, or on statistical assumptions about the underlying noise model. In contrast, we develop a simple data-driven method for removing outliers and reducing noise in unordered point clouds. We base our approach on a deep learning architecture adapted from PCPNet, which was recently proposed for estimating local 3D shape properties in point clouds. Our method classifies and discards outlier samples, and estimates correction vectors that project noisy points onto the original clean surfaces. The approach is efficient and robust to varying amounts of noise and outliers, while being able to handle large densely-sampled point clouds. In our extensive evaluation, we show an increased robustness to strong noise levels compared to various state-of-the-art methods, enabling high-quality surface reconstruction from extremely noisy real data obtained by range scans. Finally, the simplicity and universality of our approach makes it very easy to integrate in any existing geometry processing pipeline.