 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear action prediction models reveal multi-timescale locomotor control
Mar 20, 2025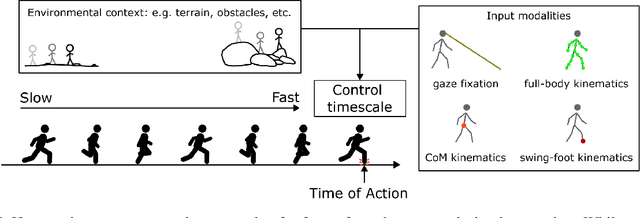



Modeling movement in real-world tasks is a fundamental scientific goal. However, it is unclear whether existing models and their assumptions, overwhelmingly tested in laboratory-constrained settings, generalize to the real world. For example, data-driven models of foot placement control -- a crucial action for stable locomotion -- assume linear and single timescale mappings. We develop nonlinear foot placement prediction models, finding that neural network architectures with flexible input history-dependence like GRU and Transformer perform best across multiple contexts (walking and running, treadmill and overground, varying terrains) and input modalities (multiple body states, gaze), outperforming traditional models. These models reveal context- and modality-dependent timescales: there is more reliance on fast-timescale predictions in complex terrain, gaze predictions precede body state predictions, and full-body state predictions precede center-of-mass-relevant predictions. Thus, nonlinear action prediction models provide quantifiable insights into real-world motor control and can be extended to other actions, contexts, and populations.
OstrichRL: A Musculoskeletal Ostrich Simulation to Study Bio-mechanical Locomotion
Dec 11, 2021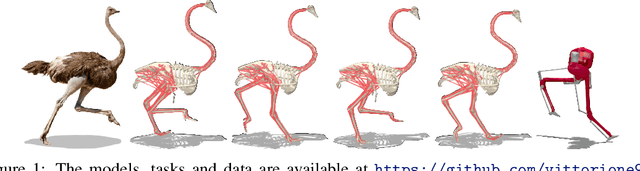
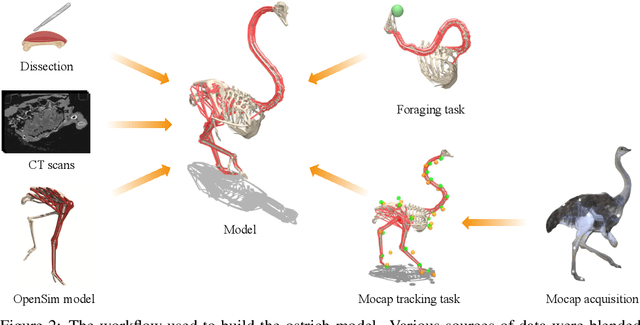
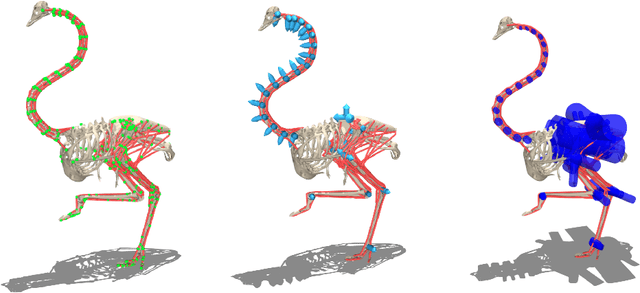
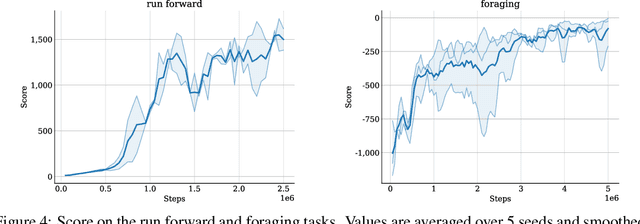
Muscle-actuated control is a research topic of interest spanning different fields, in particular biomechanics, robotics and graphics. This type of control is particularly challenging because models are often overactuated, and dynamics are delayed and non-linear. It is however a very well tested and tuned actuation model that has undergone millions of years of evolution and that involves interesting properties exploiting passive forces of muscle-tendon units and efficient energy storage and release. To facilitate research on muscle-actuated simulation, we release a 3D musculoskeletal simulation of an ostrich based on the MuJoCo simulator. Ostriches are one of the fastest bipeds on earth and are therefore an excellent model for studying muscle-actuated bipedal locomotion. The model is based on CT scans and dissections used to gather actual muscle data such as insertion sites, lengths and pennation angles. Along with this model, we also provide a set of reinforcement learning tasks, including reference motion tracking and a reaching task with the neck. The reference motion data are based on motion capture clips of various behaviors which we pre-processed and adapted to our model. This paper describes how the model was built and iteratively improved using the tasks. We evaluate the accuracy of the muscle actuation patterns by comparing them to experimentally collected electromyographic data from locomoting birds. We believe that this work can be a useful bridge between the biomechanics, reinforcement learning, graphics and robotics communities, by providing a fast and easy to use simulation.