 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear action prediction models reveal multi-timescale locomotor control
Paper and Code
Mar 20, 2025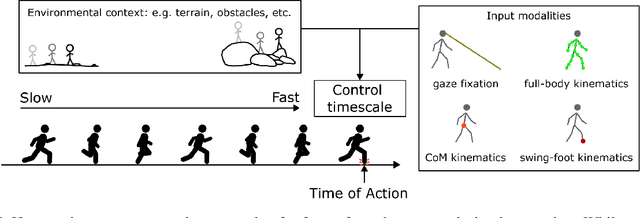



Modeling movement in real-world tasks is a fundamental scientific goal. However, it is unclear whether existing models and their assumptions, overwhelmingly tested in laboratory-constrained settings, generalize to the real world. For example, data-driven models of foot placement control -- a crucial action for stable locomotion -- assume linear and single timescale mappings. We develop nonlinear foot placement prediction models, finding that neural network architectures with flexible input history-dependence like GRU and Transformer perform best across multiple contexts (walking and running, treadmill and overground, varying terrains) and input modalities (multiple body states, gaze), outperforming traditional models. These models reveal context- and modality-dependent timescales: there is more reliance on fast-timescale predictions in complex terrain, gaze predictions precede body state predictions, and full-body state predictions precede center-of-mass-relevant predictions. Thus, nonlinear action prediction models provide quantifiable insights into real-world motor control and can be extended to other actions, contexts, and populations.