 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Sensor Interface to Improve the Teaching and Learning Experience in Arc Welding Training Tasks
Sep 10, 2021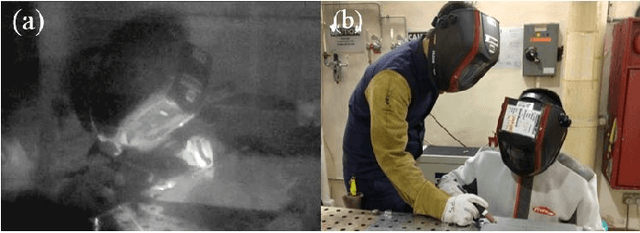
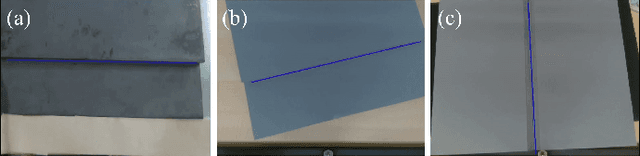
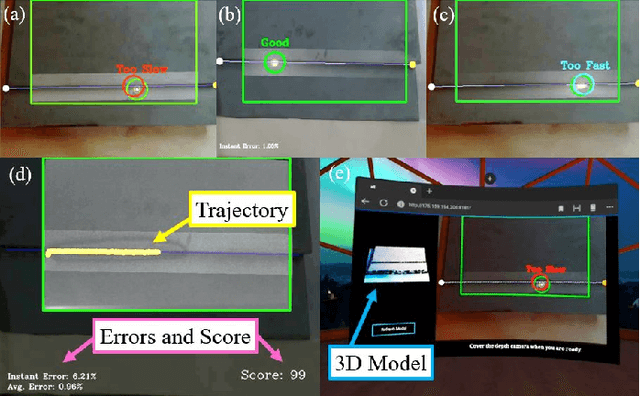
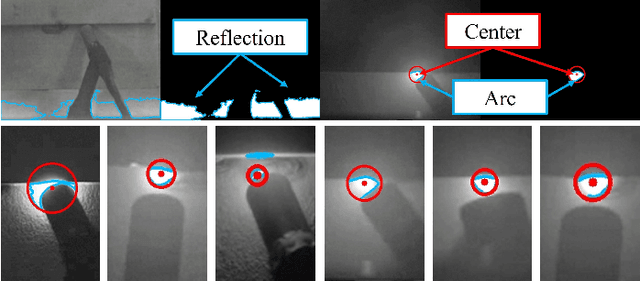
This paper presents the development of a multi-sensor extended reality platform to improve the teaching and learning experience of arc welding tasks. Traditional methods to acquire hand-eye welding coordination skills are typically conducted through one-to-one instruction where trainees/trainers must wear protective helmets and conduct several hands-on tests with metal workpieces. This approach is inefficient as the harmful light emitted from the electric arc impedes the close monitoring of the welding process (practitioners can only observe a small bright spot and most geometric information cannot be perceived). To tackle these problems, some recent training approaches have leveraged on virtual reality (VR) as a way to safely simulate the process and visualize the geometry of the workpieces. However, the synthetic nature of the virtual simulation reduces the effectiveness of the platform; It fails to comprise actual interactions with the welding environment, which may hinder the learning process of a trainee. To incorporate a real welding experience, in this work we present a new automated multi-sensor extended reality platform for arc welding training. It consists of three components: (1) An HDR camera, monitoring the real welding spot in real-time; (2) A depth sensor, capturing the 3D geometry of the scene; and (3) A head-mounted VR display, visualizing the process safely. Our innovative platform provides trainees with a "bot trainer", virtual cues of the seam geometry, automatic spot tracking, and a performance score. To validate the platform's feasibility, we conduct extensive experiments with several welding training tasks. We show that compared with the traditional training practice and recent virtual reality approaches, our automated method achieves better performances in terms of accuracy, learning curve, and effectiveness.
Path Planning with Automatic Seam Extraction over Point Cloud Models for Robotic Arc Welding
Nov 24, 2020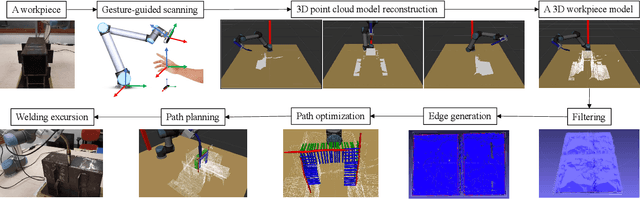
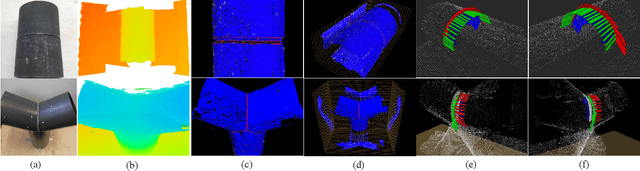
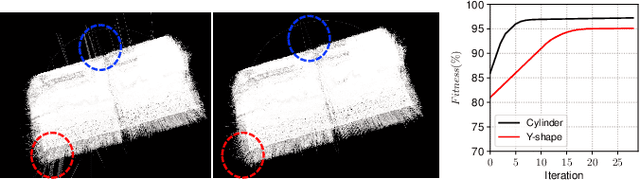
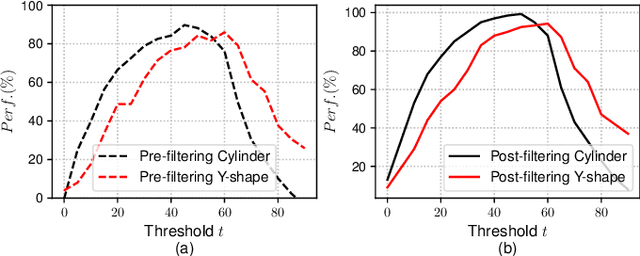
This paper presents a point cloud based robotic system for arc welding. Using hand gesture controls, the system scans partial point cloud views of workpiece and reconstructs them into a complete 3D model by a linear iterative closest point algorithm. Then, a bilateral filter is extended to denoise the workpiece model and preserve important geometrical information. To extract the welding seam from the model, a novel intensity-based algorithm is proposed that detects edge points and generates a smooth 6-DOF welding path. The methods are tested on multiple workpieces with different joint types and poses. Experimental results prove the robustness and efficiency of this robotic system on automatic path planning for welding applications.
A Point Cloud-Based Method for Automatic Groove Detection and Trajectory Generation of Robotic Arc Welding Tasks
Apr 26, 2020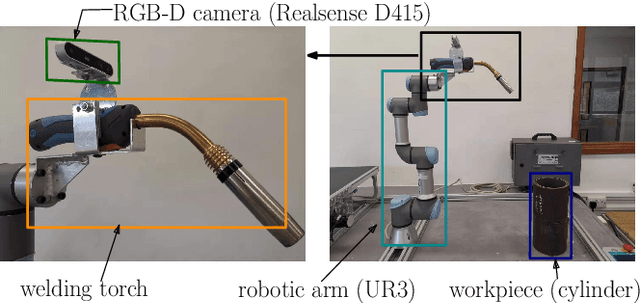
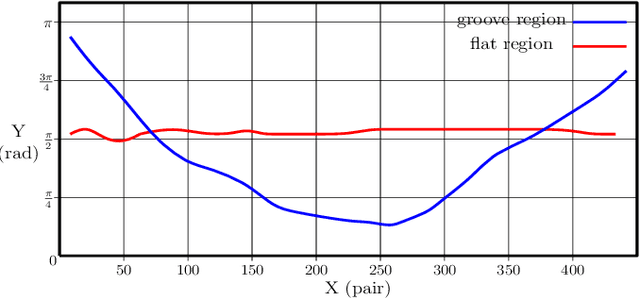
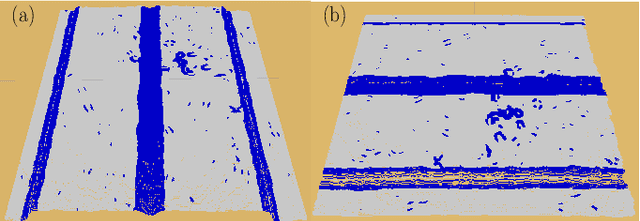
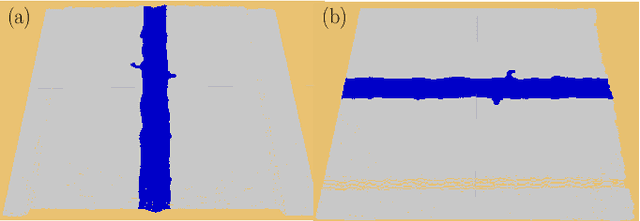
In this paper, in order to pursue high-efficiency robotic arc welding tasks, we propose a method based on point cloud acquired by an RGB-D sensor. The method consists of two parts: welding groove detection and 3D welding trajectory generation. The actual welding scene could be displayed in 3D point cloud format. Focusing on the geometric feature of the welding groove, the detection algorithm is capable of adapting well to different welding workpieces with a V-type welding groove. Meanwhile, a 3D welding trajectory involving 6-DOF poses of the welding groove for robotic manipulator motion is generated. With an acceptable error in trajectory generation, the robotic manipulator could drive the welding torch to follow the trajectory and execute welding tasks. In this paper, details of the integrated robotic system are also presented. Experimental results prove application value of the presented welding robotic system.