Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning with Automatic Seam Extraction over Point Cloud Models for Robotic Arc Welding
Nov 24, 2020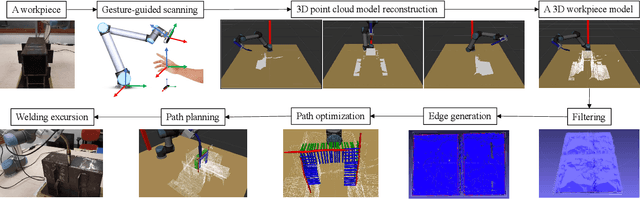
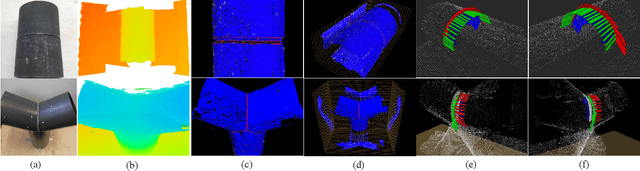
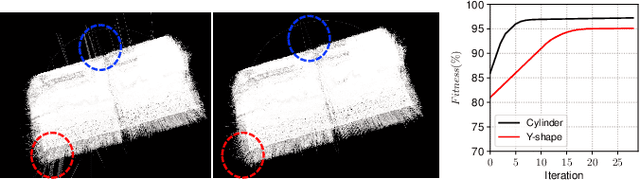
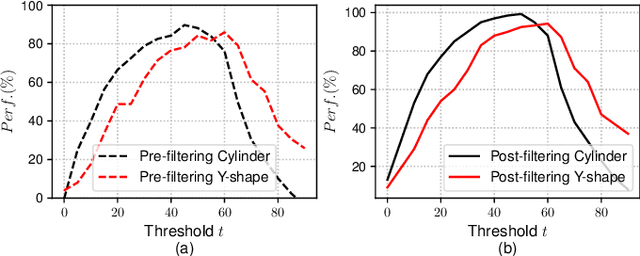
This paper presents a point cloud based robotic system for arc welding. Using hand gesture controls, the system scans partial point cloud views of workpiece and reconstructs them into a complete 3D model by a linear iterative closest point algorithm. Then, a bilateral filter is extended to denoise the workpiece model and preserve important geometrical information. To extract the welding seam from the model, a novel intensity-based algorithm is proposed that detects edge points and generates a smooth 6-DOF welding path. The methods are tested on multiple workpieces with different joint types and poses. Experimental results prove the robustness and efficiency of this robotic system on automatic path planning for welding applications.
* 8 pages, 13 figures and 2 tables
Via