 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepScanner: a Robotic System for Automated 2D Object Dataset Collection with Annotations
Aug 05, 2021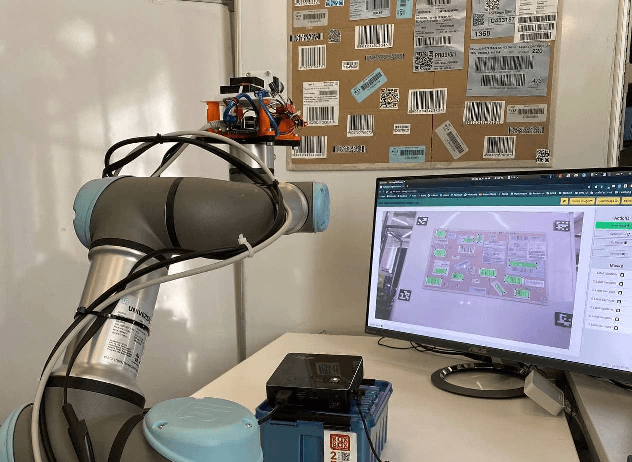

In the proposed study, we describe the possibility of automated dataset collection using an articulated robot. The proposed technology reduces the number of pixel errors on a polygonal dataset and the time spent on manual labeling of 2D objects. The paper describes a novel automatic dataset collection and annotation system, and compares the results of automated and manual dataset labeling. Our approach increases the speed of data labeling 240-fold, and improves the accuracy compared to manual labeling 13-fold. We also present a comparison of metrics for training a neural network on a manually annotated and an automatically collected dataset.
Coupling of localization and depth data for mapping using Intel RealSense T265 and D435i cameras
Apr 01, 2020
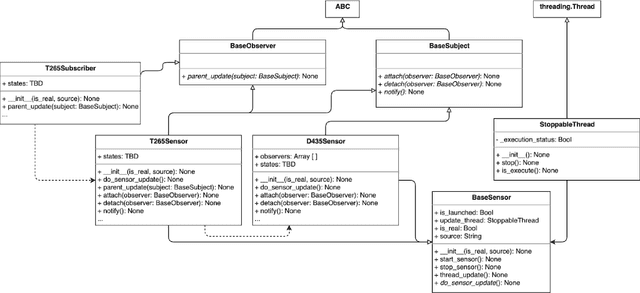
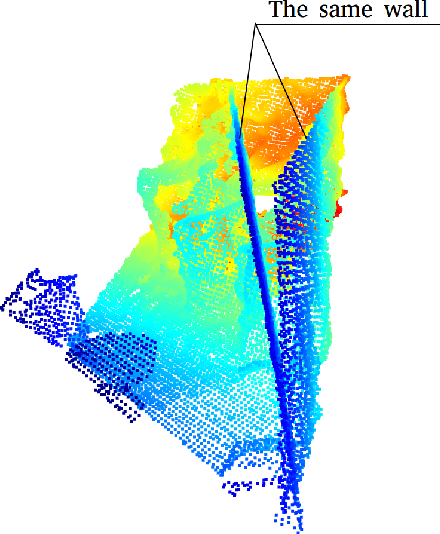
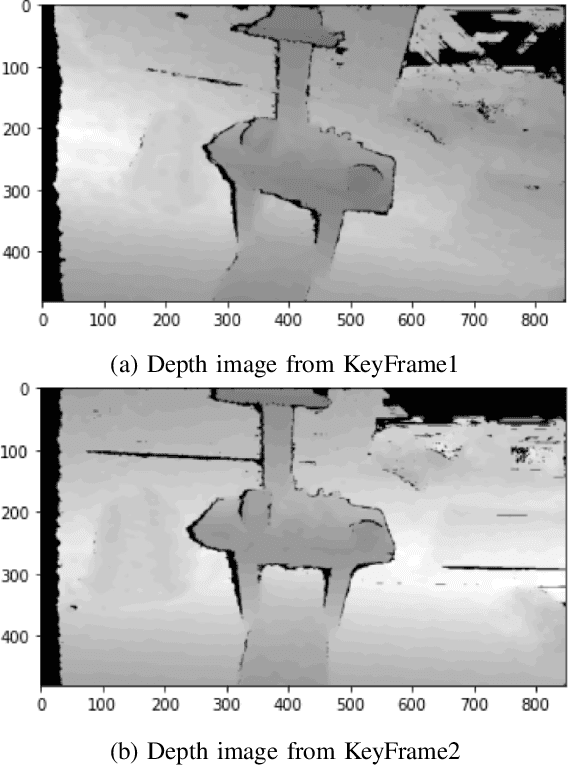
We propose to couple two types of Intel RealSense sensors (tracking T265 and depth D435i) in order to obtain localization and 3D occupancy map of the indoor environment. We implemented a python-based observer pattern with multi-threaded approach for camera data synchronization. We compared different point cloud (PC) alignment methods (using transformations obtained from tracking camera and from ICP family methods). Tracking camera and PC alignment allow us to generate a set of transformations between frames. Based on these transformations we obtained different trajectories and provided their analysis. Finally, having poses for all frames, we combined depth data. Firstly we obtained a joint PC representing the whole scene. Then we used Octomap representation to build a map.