 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots in the Danger Zone: Exploring Public Perception through Engagement
Apr 01, 2020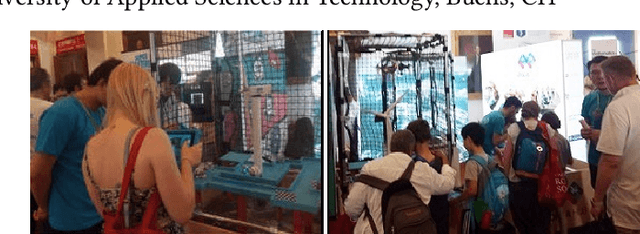
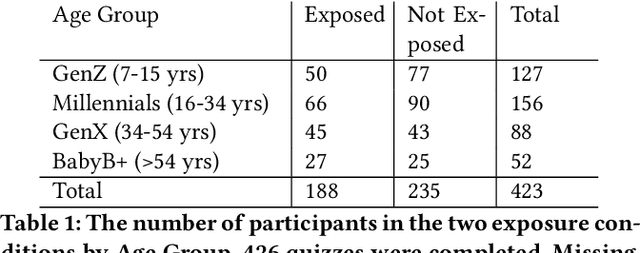
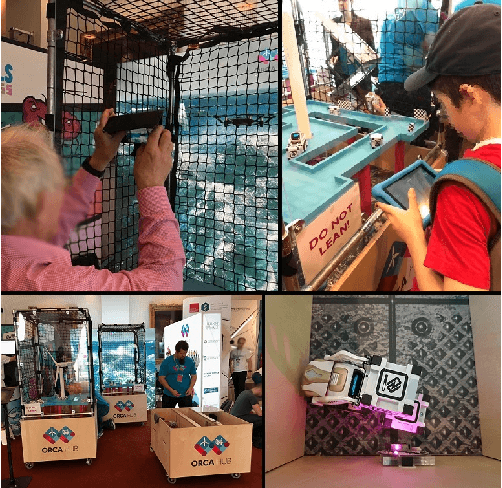
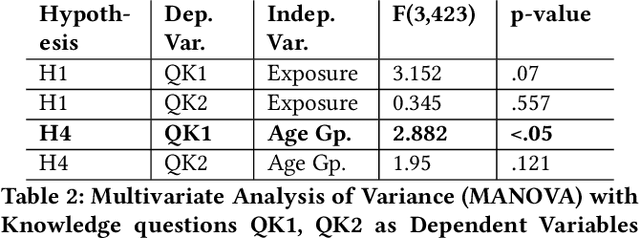
Public perceptions of Robotics and Artificial Intelligence (RAI) are important in the acceptance, uptake, government regulation and research funding of this technology. Recent research has shown that the public's understanding of RAI can be negative or inaccurate. We believe effective public engagement can help ensure that public opinion is better informed. In this paper, we describe our first iteration of a high throughput in-person public engagement activity. We describe the use of a light touch quiz-format survey instrument to integrate in-the-wild research participation into the engagement, allowing us to probe both the effectiveness of our engagement strategy, and public perceptions of the future roles of robots and humans working in dangerous settings, such as in the off-shore energy sector. We critique our methods and share interesting results into generational differences within the public's view of the future of Robotics and AI in hazardous environments. These findings include that older peoples' views about the future of robots in hazardous environments were not swayed by exposure to our exhibit, while the views of younger people were affected by our exhibit, leading us to consider carefully in future how to more effectively engage with and inform older people.
* Accepted in HRI 2020, Keywords: Human robot interaction, robotics, artificial intelligence, public engagement, public perceptions of robots, robotics and society
A Distributed Epigenetic Shape Formation and Regeneration Algorithm for a Swarm of Robots
Oct 29, 2018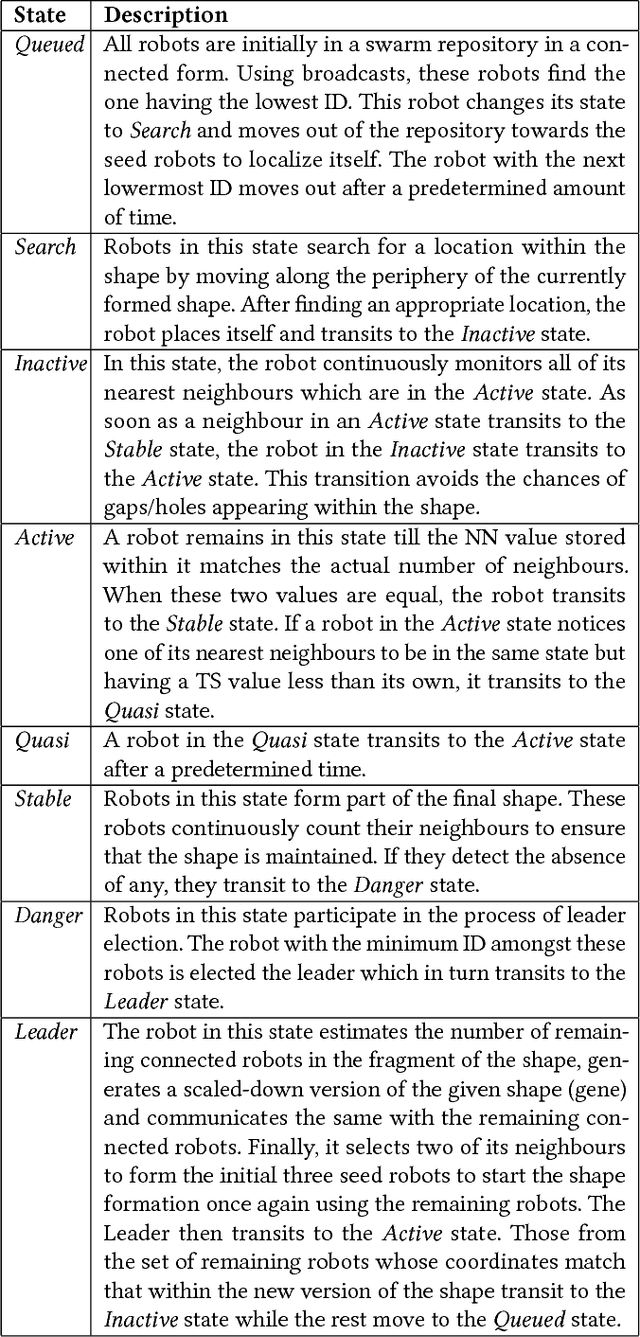
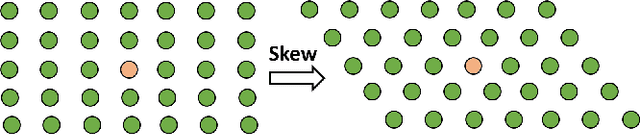
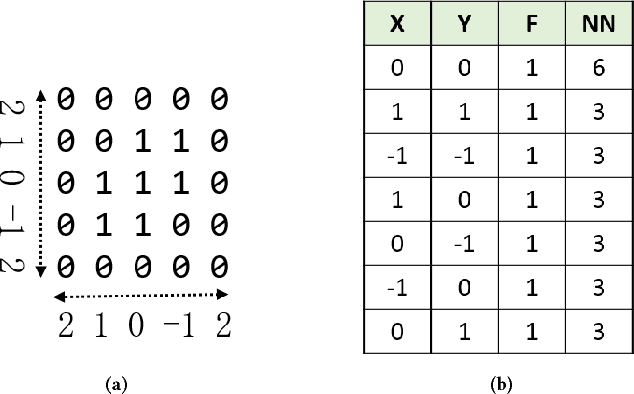
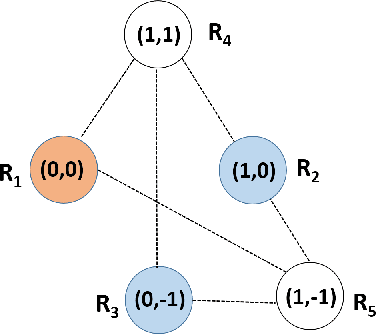
Living cells exhibit both growth and regeneration of body tissues. Epigenetic Tracking (ET), models this growth and regenerative qualities of living cells and has been used to generate complex 2D and 3D shapes. In this paper, we present an ET based algorithm that aids a swarm of identically-programmed robots to form arbitrary shapes and regenerate them when cut. The algorithm works in a distributed manner using only local interactions and computations without any central control and aids the robots to form the shape in a triangular lattice structure. In case of damage or splitting of the shape, it helps each set of the remaining robots to regenerate and position themselves to build scaled down versions of the original shape. The paper presents the shapes formed and regenerated by the algorithm using the Kilombo simulator.
* 8 pages, 9 figures, GECCO-18 conference
On an Immuno-inspired Distributed, Embodied Action-Evolution cum Selection Algorithm
Jun 26, 2018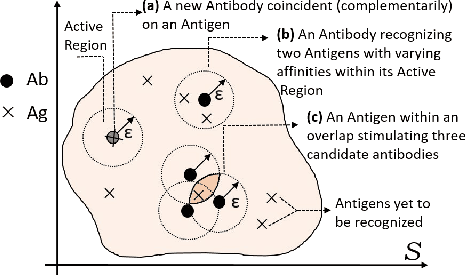
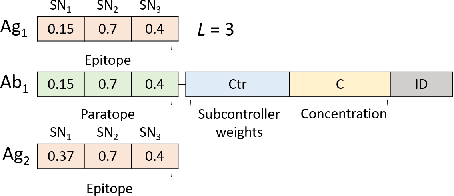
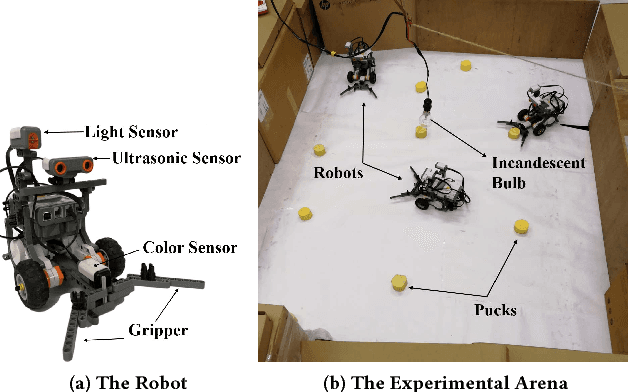

Traditional Evolutionary Robotics (ER) employs evolutionary techniques to search for a single monolithic controller which can aid a robot to learn a desired task. These techniques suffer from bootstrap and deception issues when the tasks are complex for a single controller to learn. Behaviour-decomposition techniques have been used to divide a task into multiple subtasks and evolve separate subcontrollers for each subtask. However, these subcontrollers and the associated subcontroller arbitrator(s) are all evolved off-line. A distributed, fully embodied and evolutionary version of such approaches will greatly aid online learning and help reduce the reality gap. In this paper, we propose an immunology-inspired embodied action-evolution cum selection algorithm that can cater to distributed ER. This algorithm evolves different subcontrollers for different portions of the search space in a distributed manner just as antibodies are evolved and primed for different antigens in the antigenic space. Experimentation on a collective of real robots embodied with the algorithm showed that a repertoire of antibody-like subcontrollers was created, evolved and shared on-the-fly to cope up with different environmental conditions. In addition, instead of the conventionally used approach of broadcasting for sharing, we present an Intelligent Packet Migration scheme that reduces energy consumption.
A Practitioners' Guide to Transfer Learning for Text Classification using Convolutional Neural Networks
Jan 19, 2018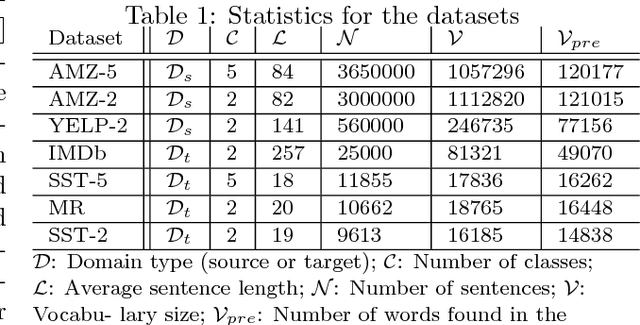
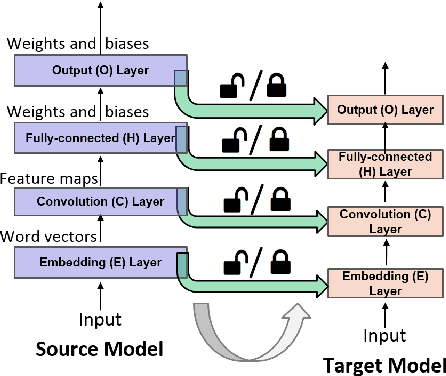
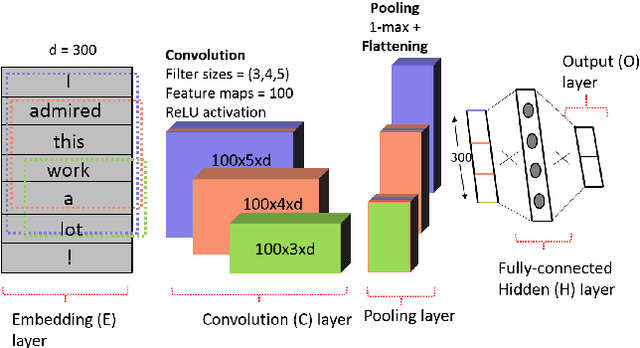
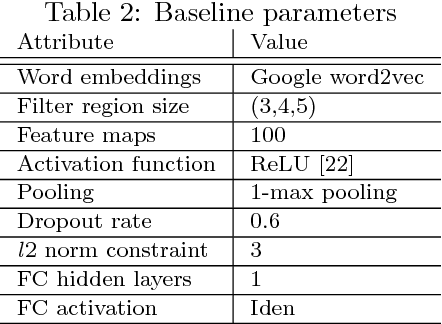
Transfer Learning (TL) plays a crucial role when a given dataset has insufficient labeled examples to train an accurate model. In such scenarios, the knowledge accumulated within a model pre-trained on a source dataset can be transferred to a target dataset, resulting in the improvement of the target model. Though TL is found to be successful in the realm of image-based applications, its impact and practical use in Natural Language Processing (NLP) applications is still a subject of research. Due to their hierarchical architecture, Deep Neural Networks (DNN) provide flexibility and customization in adjusting their parameters and depth of layers, thereby forming an apt area for exploiting the use of TL. In this paper, we report the results and conclusions obtained from extensive empirical experiments using a Convolutional Neural Network (CNN) and try to uncover thumb rules to ensure a successful positive transfer. In addition, we also highlight the flawed means that could lead to a negative transfer. We explore the transferability of various layers and describe the effect of varying hyper-parameters on the transfer performance. Also, we present a comparison of accuracy value and model size against state-of-the-art methods. Finally, we derive inferences from the empirical results and provide best practices to achieve a successful positive transfer.