 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Sensor Fusion for Navigation and Mapping in Autonomous Vehicles: Accurate Localization in Urban Environments
Mar 25, 2021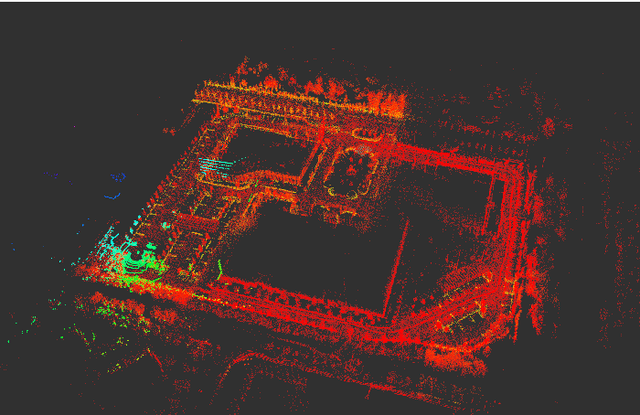
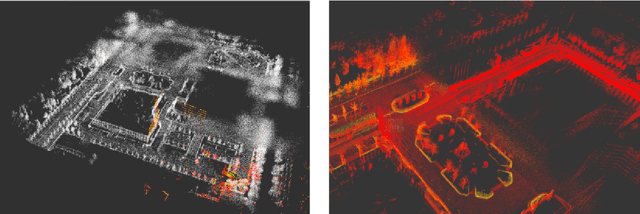
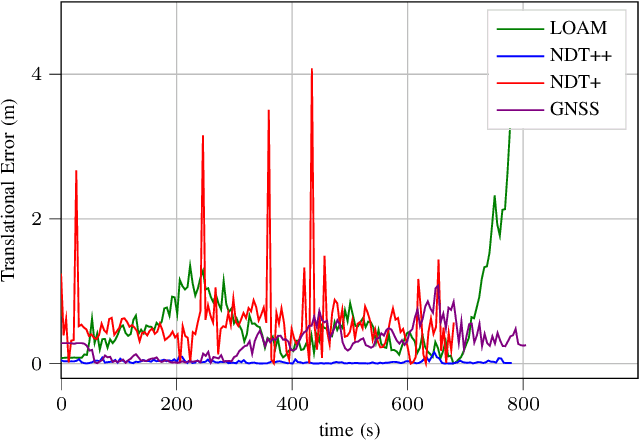
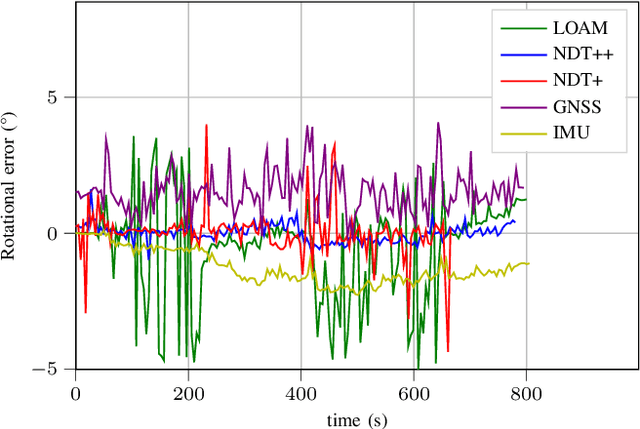
The combination of data from multiple sensors, also known as sensor fusion or data fusion, is a key aspect in the design of autonomous robots. In particular, algorithms able to accommodate sensor fusion techniques enable increased accuracy, and are more resilient against the malfunction of individual sensors. The development of algorithms for autonomous navigation, mapping and localization have seen big advancements over the past two decades. Nonetheless, challenges remain in developing robust solutions for accurate localization in dense urban environments, where the so called last-mile delivery occurs. In these scenarios, local motion estimation is combined with the matching of real-time data with a detailed pre-built map. In this paper, we utilize data gathered with an autonomous delivery robot to compare different sensor fusion techniques and evaluate which are the algorithms providing the highest accuracy depending on the environment. The techniques we analyze and propose in this paper utilize 3D lidar data, inertial data, GNSS data and wheel encoder readings. We show how lidar scan matching combined with other sensor data can be used to increase the accuracy of the robot localization and, in consequence, its navigation. Moreover, we propose a strategy to reduce the impact on navigation performance when a change in the environment renders map data invalid or part of the available map is corrupted.
Collaborative Multi-Robot Systems for Search and Rescue: Coordination and Perception
Aug 28, 2020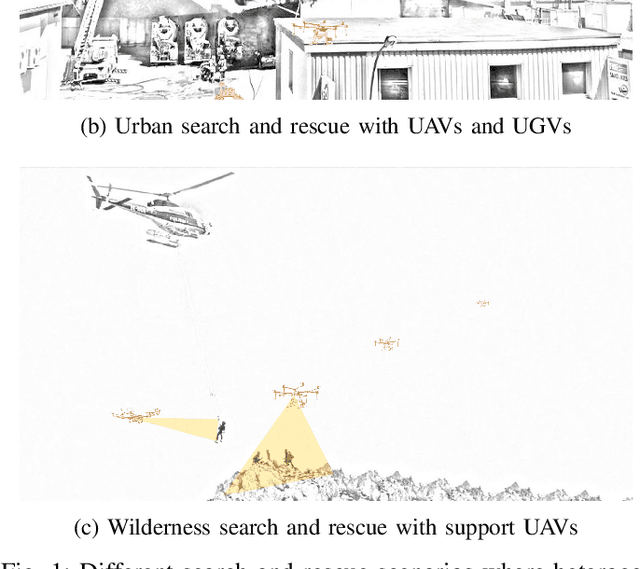
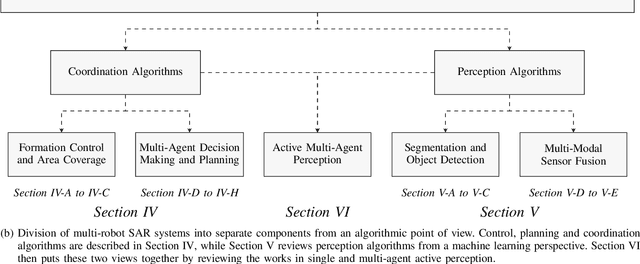
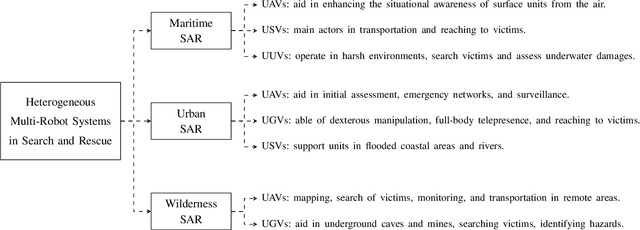
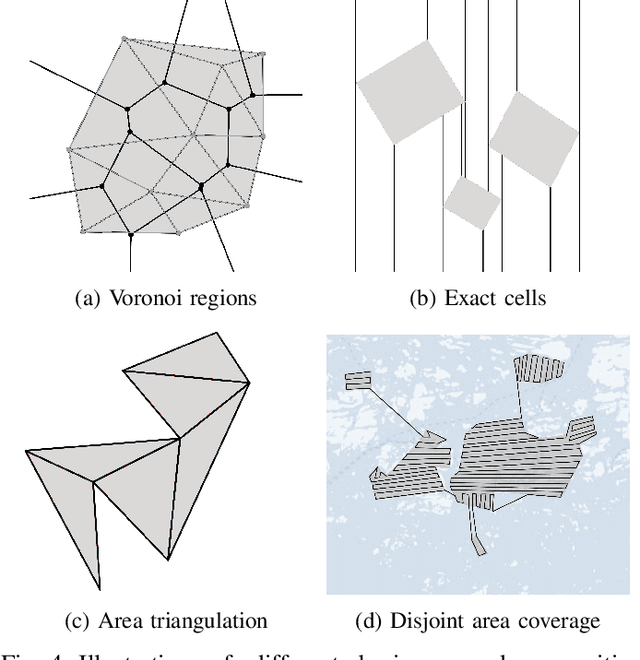
Autonomous or teleoperated robots have been playing increasingly important roles in civil applications in recent years. Across the different civil domains where robots can support human operators, one of the areas where they can have more impact is in search and rescue (SAR) operations. In particular, multi-robot systems have the potential to significantly improve the efficiency of SAR personnel with faster search of victims, initial assessment and mapping of the environment, real-time monitoring and surveillance of SAR operations, or establishing emergency communication networks, among other possibilities. SAR operations encompass a wide variety of environments and situations, and therefore heterogeneous and collaborative multi-robot systems can provide the most advantages. In this paper, we review and analyze the existing approaches to multi-robot SAR support, from an algorithmic perspective and putting an emphasis on the methods enabling collaboration among the robots as well as advanced perception through machine vision and multi-agent active perception. Furthermore, we put these algorithms in the context of the different challenges and constraints that various types of robots (ground, aerial, surface or underwater) encounter in different SAR environments (maritime, urban, wilderness or other post-disaster scenarios). This is, to the best of our knowledge, the first review considering heterogeneous SAR robots across different environments, while giving two complimentary points of view: control mechanisms and machine perception. Based on our review of the state-of-the-art, we discuss the main open research questions, and outline our insights on the current approaches that have potential to improve the real-world performance of multi-robot SAR systems.
AutoSOS: Towards Multi-UAV Systems Supporting Maritime Search and Rescue with Lightweight AI and Edge Computing
May 07, 2020
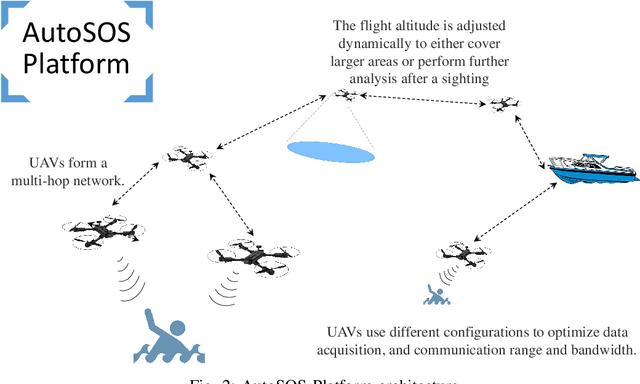
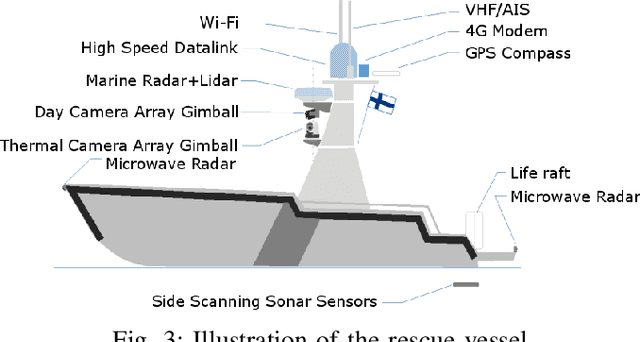

Rescue vessels are the main actors in maritime safety and rescue operations. At the same time, aerial drones bring a significant advantage into this scenario. This paper presents the research directions of the AutoSOS project, where we work in the development of an autonomous multi-robot search and rescue assistance platform capable of sensor fusion and object detection in embedded devices using novel lightweight AI models. The platform is meant to perform reconnaissance missions for initial assessment of the environment using novel adaptive deep learning algorithms that efficiently use the available sensors and computational resources on drones and rescue vessel. When drones find potential objects, they will send their sensor data to the vessel to verity the findings with increased accuracy. The actual rescue and treatment operation are left as the responsibility of the rescue personnel. The drones will autonomously reconfigure their spatial distribution to enable multi-hop communication, when a direct connection between a drone transmitting information and the vessel is unavailable.
End-to-End Design for Self-Reconfigurable Heterogeneous Robotic Swarms
Apr 29, 2020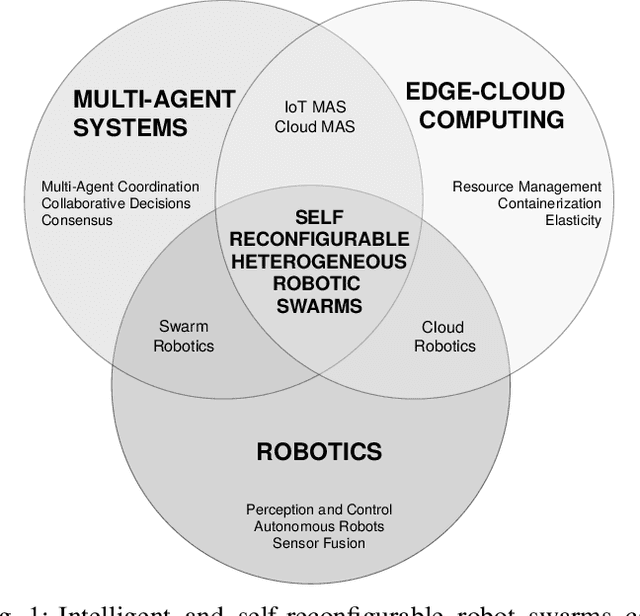
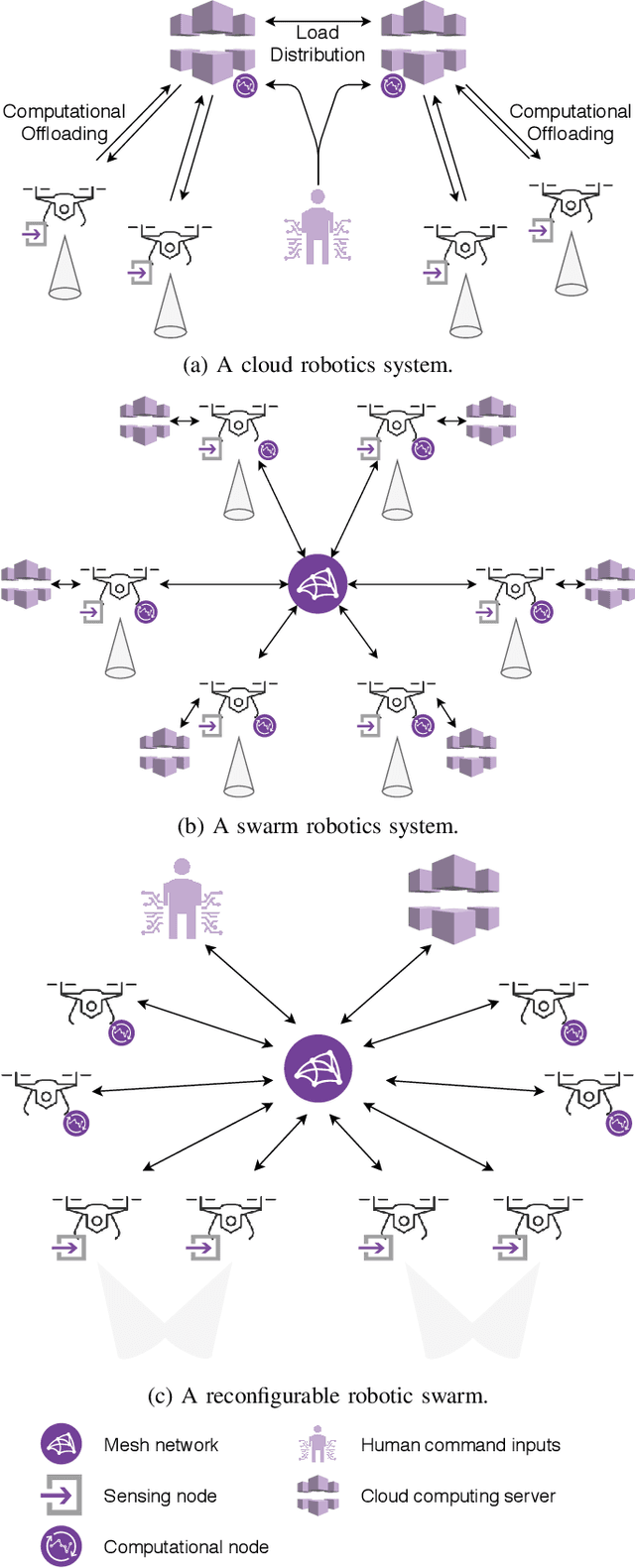
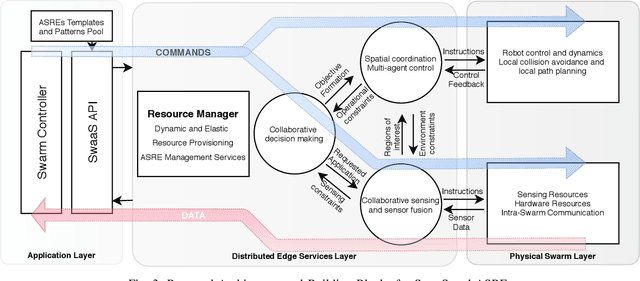
More widespread adoption requires swarms of robots to be more flexible for real-world applications. Multiple challenges remain in complex scenarios where a large amount of data needs to be processed in real-time and high degrees of situational awareness are required. The options in this direction are limited in existing robotic swarms, mostly homogeneous robots with limited operational and reconfiguration flexibility. We address this by bringing elastic computing techniques and dynamic resource management from the edge-cloud computing domain to the swarm robotics domain. This enables the dynamic provisioning of collective capabilities in the swarm for different applications. Therefore, we transform a swarm into a distributed sensing and computing platform capable of complex data processing tasks, which can then be offered as a service. In particular, we discuss how this can be applied to adaptive resource management in a heterogeneous swarm of drones, and how we are implementing the dynamic deployment of distributed data processing algorithms. With an elastic drone swarm built on reconfigurable hardware and containerized services, it will be possible to raise the self-awareness, degree of intelligence, and level of autonomy of heterogeneous swarms of robots. We describe novel directions for collaborative perception, and new ways of interacting with a robotic swarm.